Komende weken verschijnt hier de info over de race auto.
De te gebruiken onderdelen voor de beturing zijn o.a:
- Een arduino uno.
- Een l298N H brug voor de motor.
- Een LCD scherm met i2c adapter.
- Een servo voor de besturing van de voor wielen.
- Een motor voor de aandrijving. Dit mag een eigen motor zijn.
- Een 7805 spannings regelaar.
- Een bluetooth ontvanger/zender (hc05).
- Batterij houder ( eigen keuze en afhankelijk van de motoren).
- Een ATTINY en led verlichting.
- Bedrading.
Verder ontwerp je zelf de auto en de mechanische besturing.
We gebruik verschillende onderdelen en niet zoals het prototype 100% lego.
In het prototype zijn de spindel en de tendwielen niet standaard en komen ze uit de 3D printer.
De tip is: gebruik als basis een brood trommel zoals bij de voetbalrobot auto.
Op deze manier is hij ook makkelijk mee naar huis te nemen.
In het portfolio moet ook worden opgenomen:
- De werk planning van het groepje.
-De kosten berekening van de gebruikte materialen.
-Een morfologisch overzicht van waaruit je de gemaakte onderdelen en materiaal keuzes kan verklaren.
verder moet het autootje nagebouwd kunnen worden aan de hand van je portfolio.

De werk processen die je tegen kan komen in het ontwerp proces ijdens dit project.
B1-K1-W1 Verzamelt en verwerkt ontwerpgegevens
B1-K1-W2 Werkt ontwerpen uit
B1-K1-W3 Kiest materialen en onderdelen
B1-K1-W4 Maakt een kosten berekening
B1-K2-W4 Levert het werk op
P1-K1-W1 Verzamelt en verwerkt productiegegevens
Het toepassen van deze werk processen is een voorbereiding op jullie examens in leerjaar 4
korte impresssie van het tweeede project.
Het filmpje is nog niet af, er moeten nog wat onderdelen toegevoegd worden en een totaal aansluit schema.
Dit gebeurd tijdens de lessen.
En natuurlijk passende muziek.
De ontwerpfase
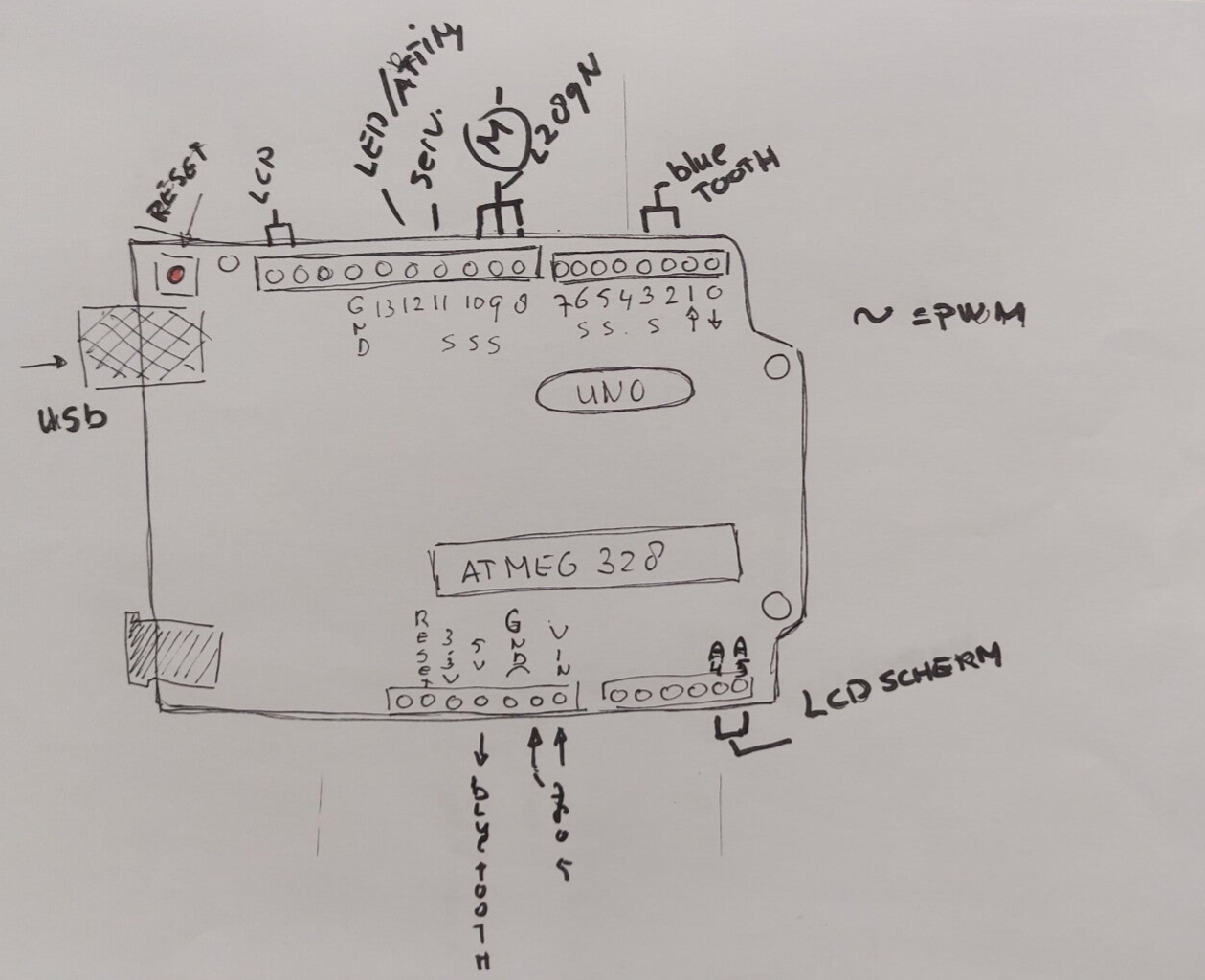
We beginnen met het ontwerpen van het electrische schema.
We doen dit als bedradings schema in klad en niet als electrisch schema.
Dit schema zie je ook weer terug in het met onderdelen opgebouwde doosje.
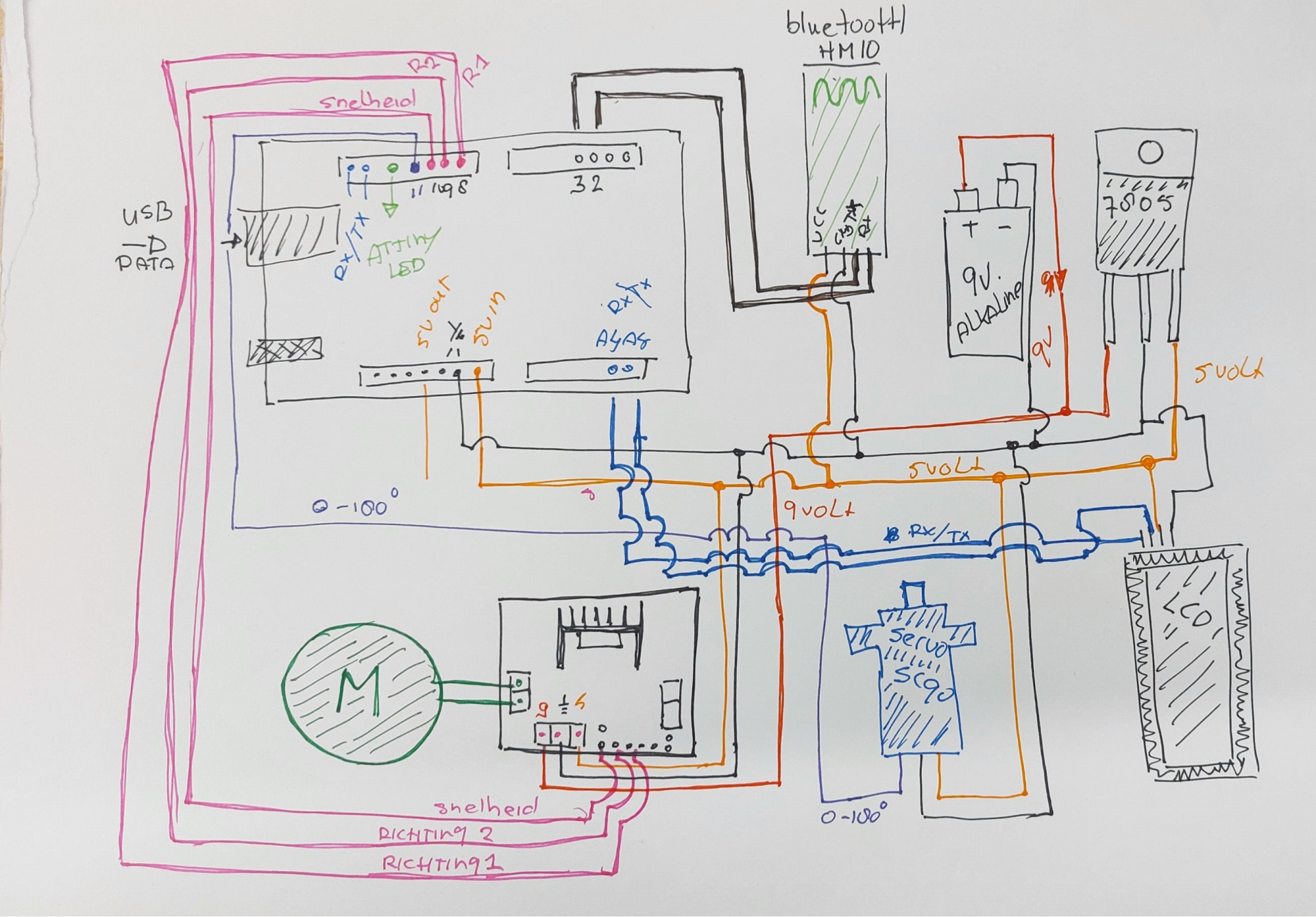
Een eerste opzet van het bedradings schema.
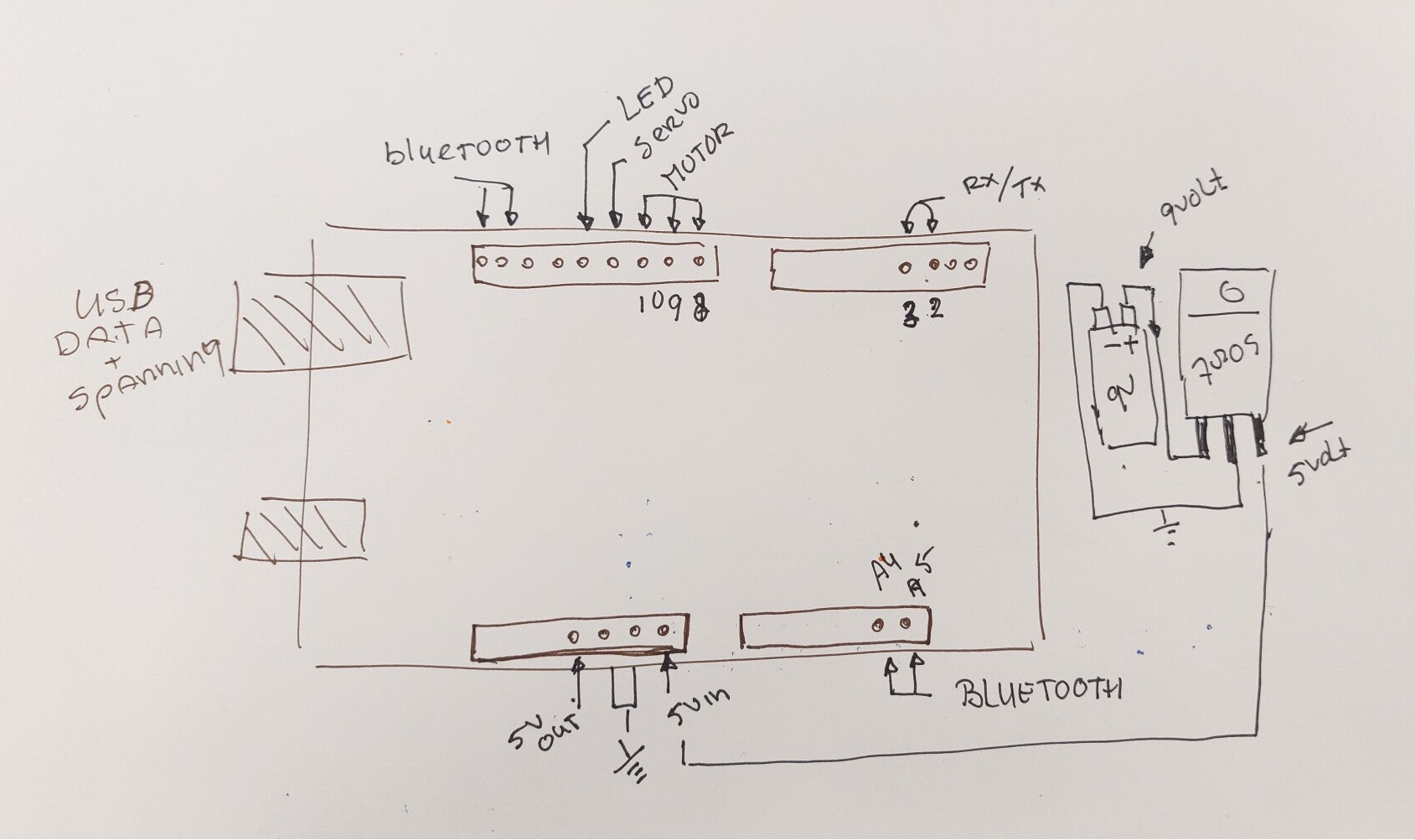
De hoofd aansluitingen op arduino uno,
We gebruiken maar 1 motor aansluiting van de L298N.
De sero voor de wiel besturing verbinden we ook met de arduino uno.
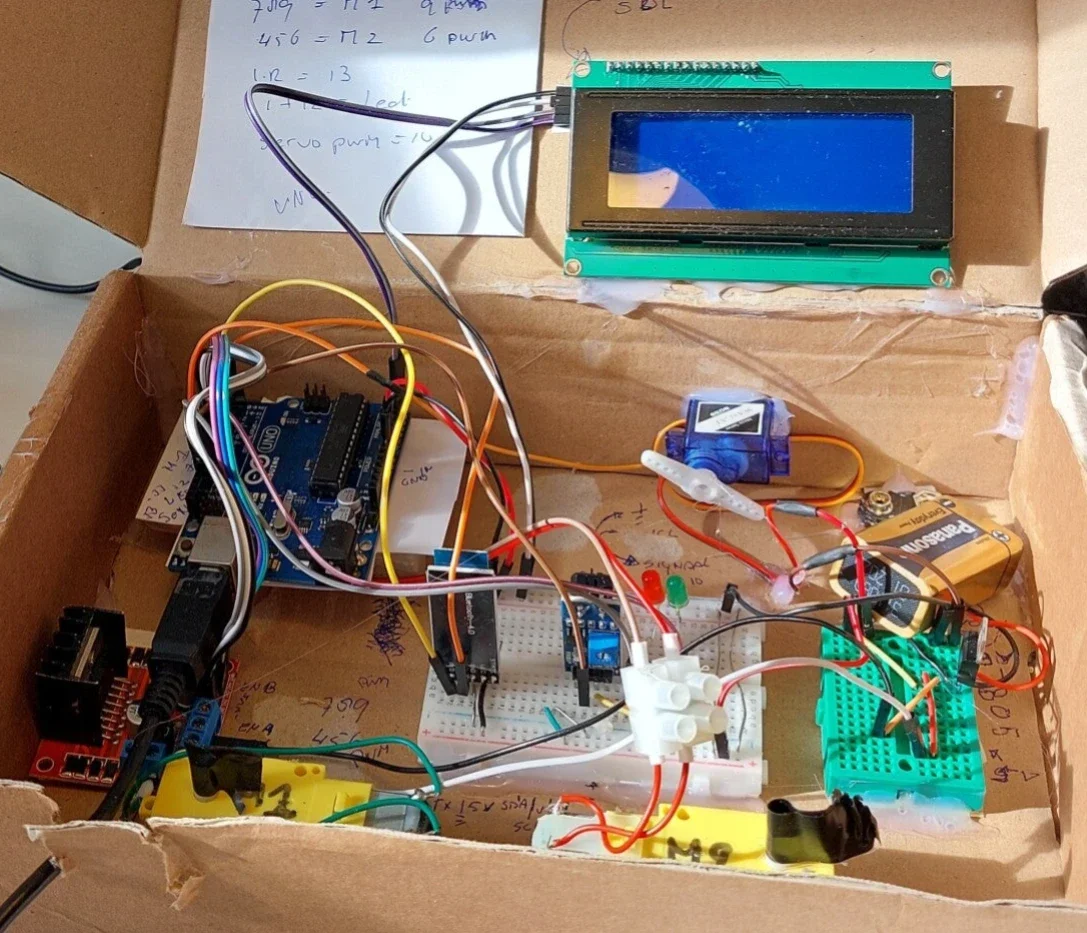
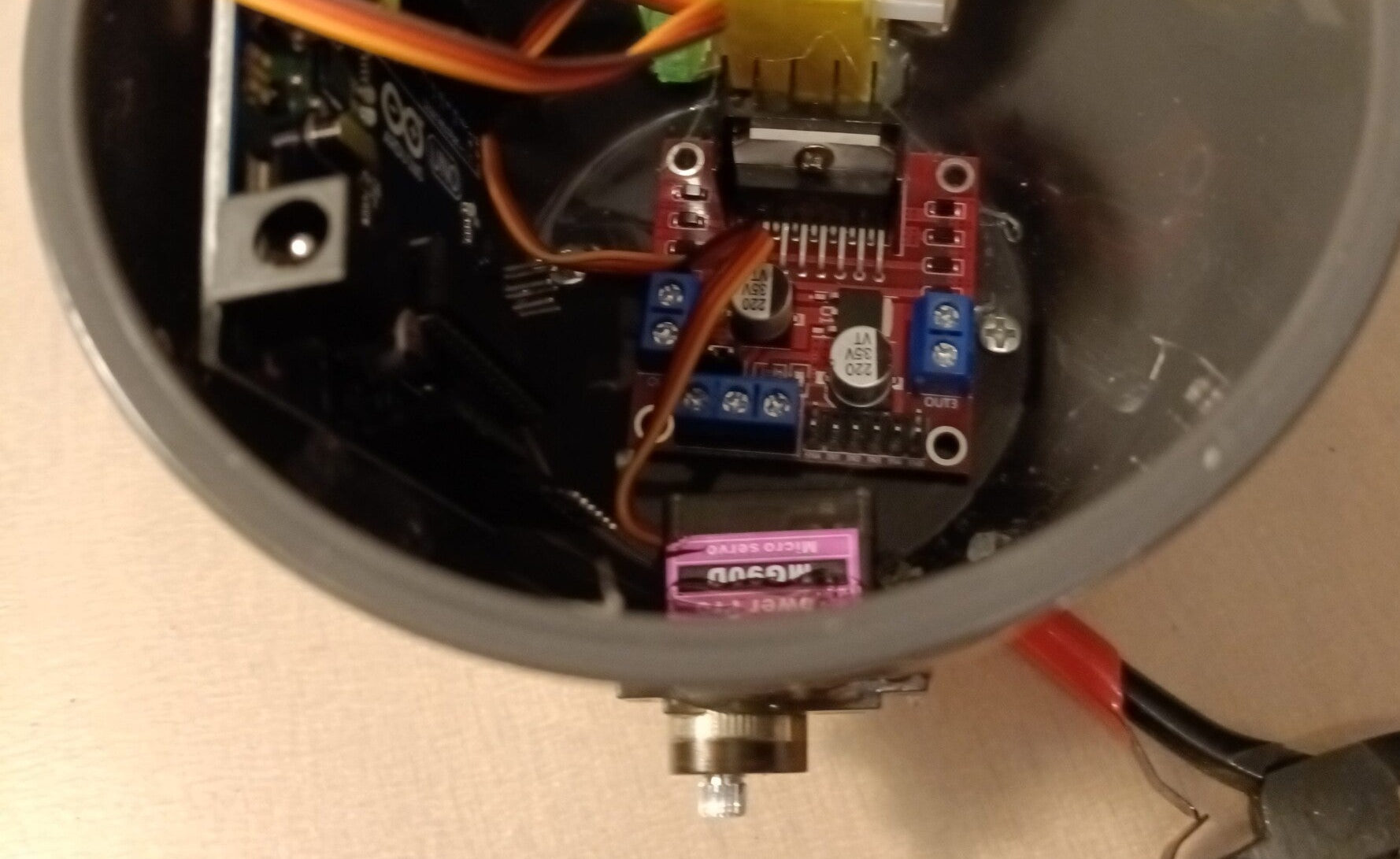
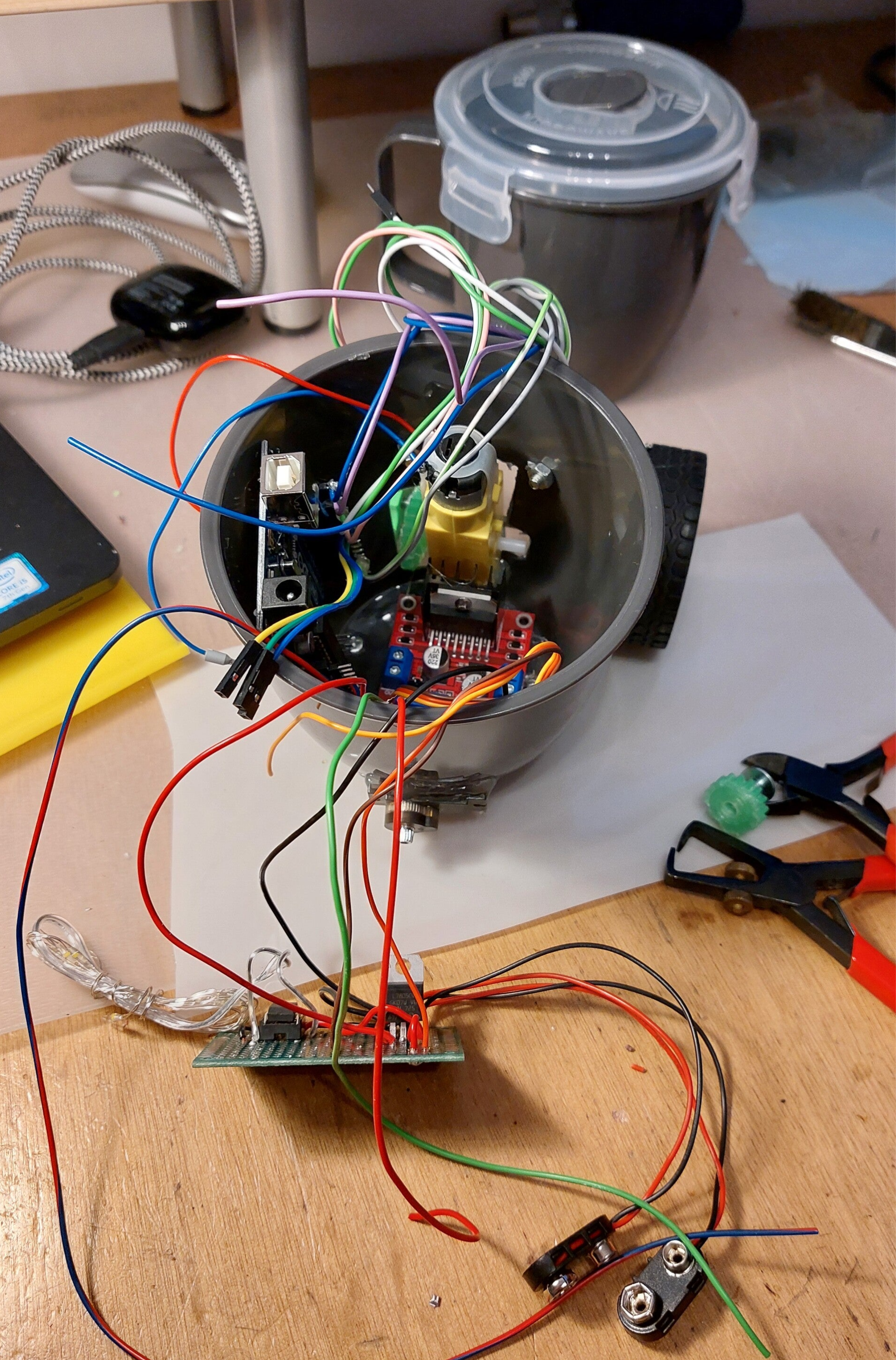
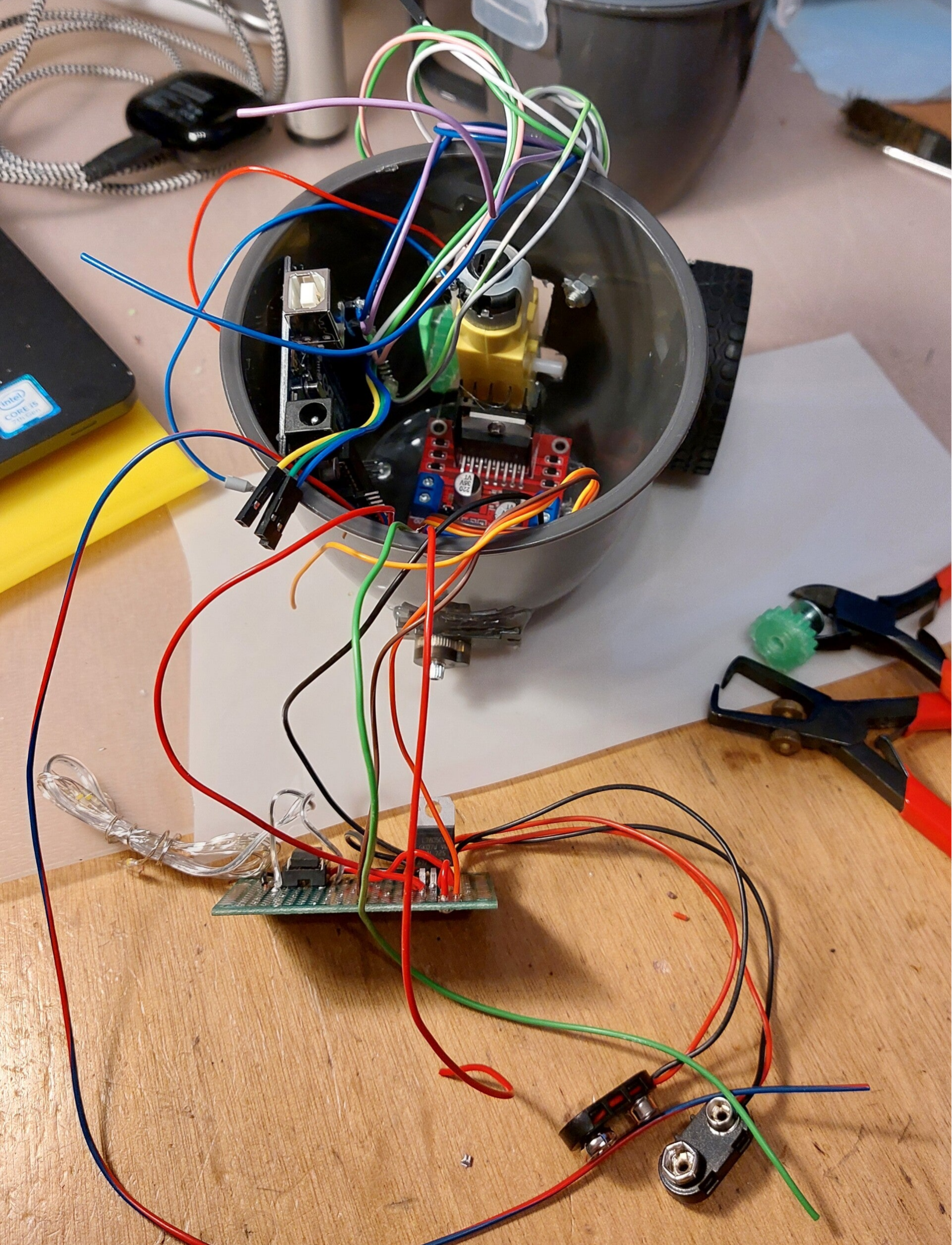
Na het schema ontworpen te hebben gaan we het in een doosje bouwen om te kunnen programmeren en testen en is het ook makkelijker mee naar huis te nemen.
De onderdelen voor de besturing en de motor aandrijving ontwerpen jullie zelf of halen ze als STL bestand van internet en gaan ze daarna printen of lasersnijden.
Je mag geen kant en klare onderdelen gebruiken voor de aandrijving en de besturing. De uitzondering is wat mecano.
De behuizing mag wel gekocht en aangepast worden.
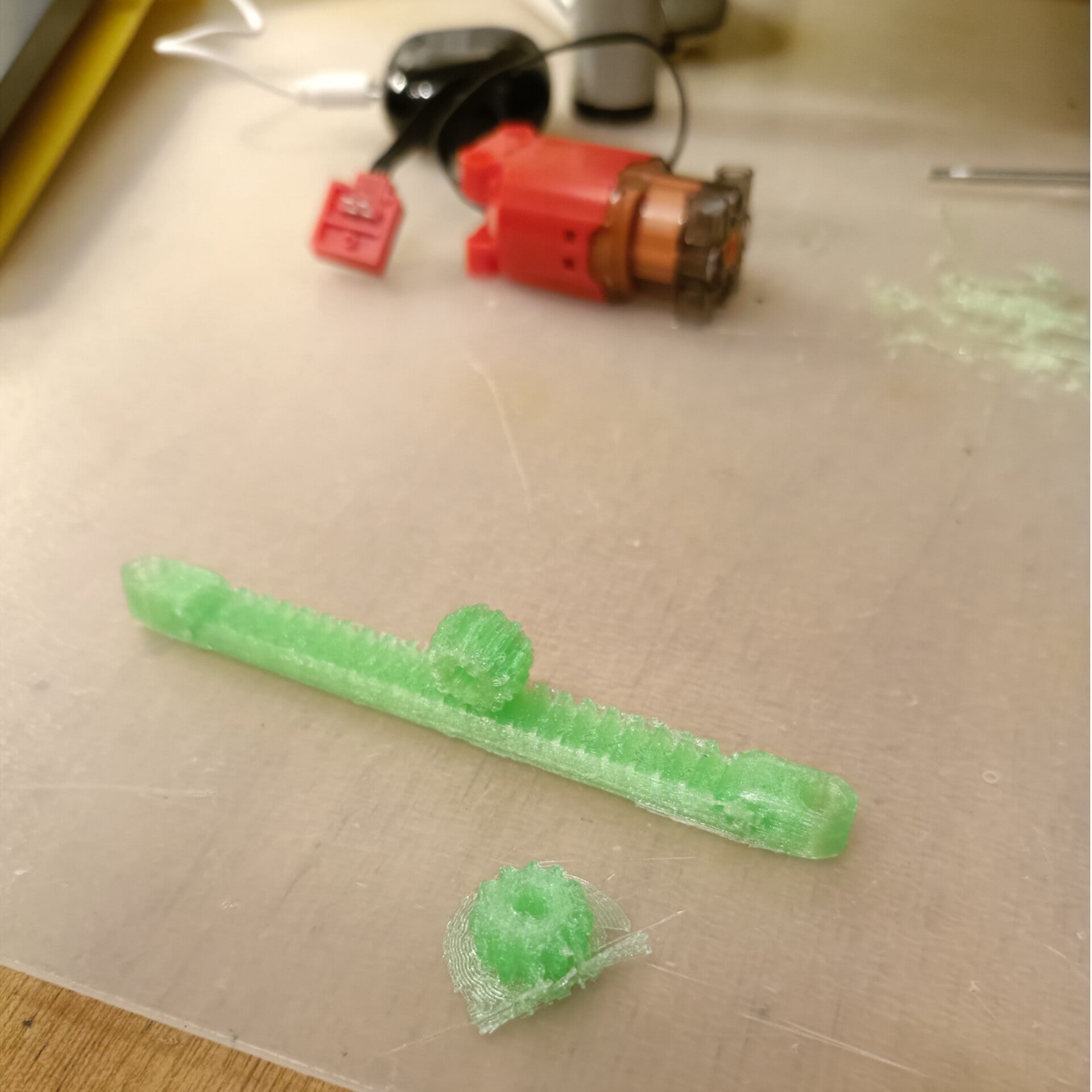
De onderdelen maken we zelf met bhulp van de 3d printer of de lasersnijder.
Tandheugel met tandwiel.
Diverse tandwielen.


De koffiebeker waar alles in moet komen.
Inbouw/maak voorbeelden van ee n race auto in een koffie mok.

Het aangedreven wiel met tandwiel.

Proefpassen van de grootste onderdelen.

De motor plaatsen in de koffiemok.
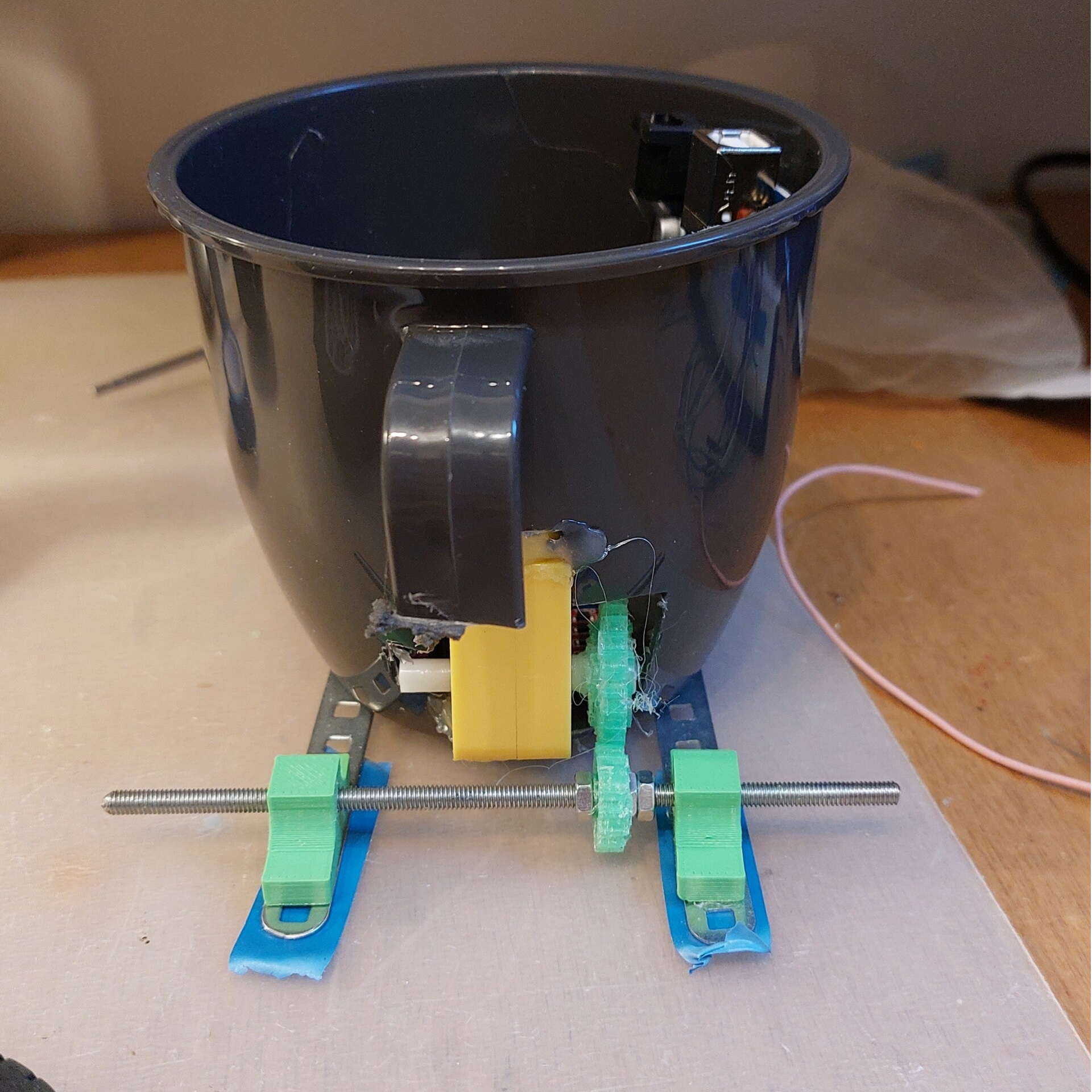
De aandrijf as plaatsen

De constructie verstevigen in de op en neer gaande beweging.
De constructie zijdelings stabiliseren.
De servo van de voorwiel besturing plaatsen.
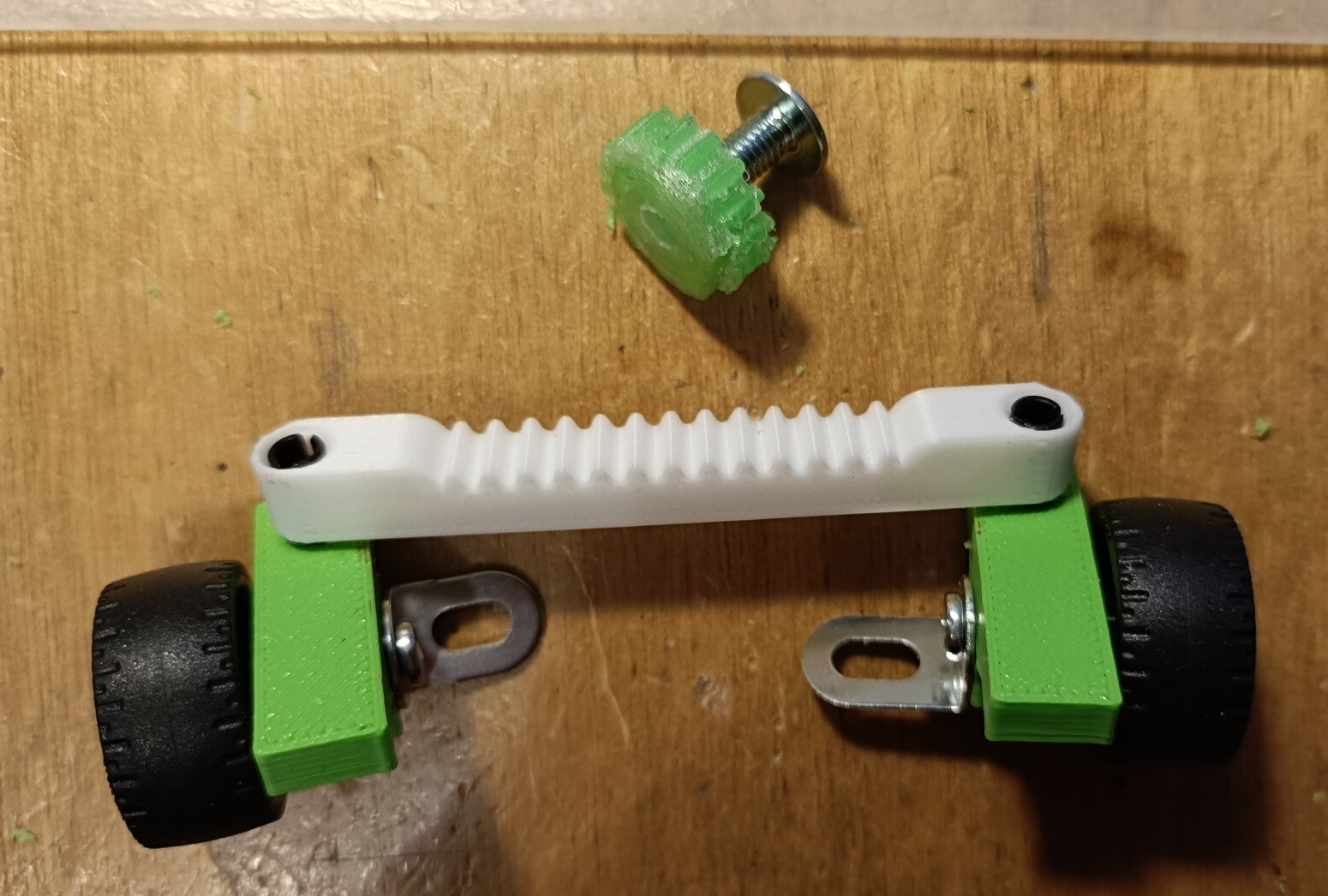
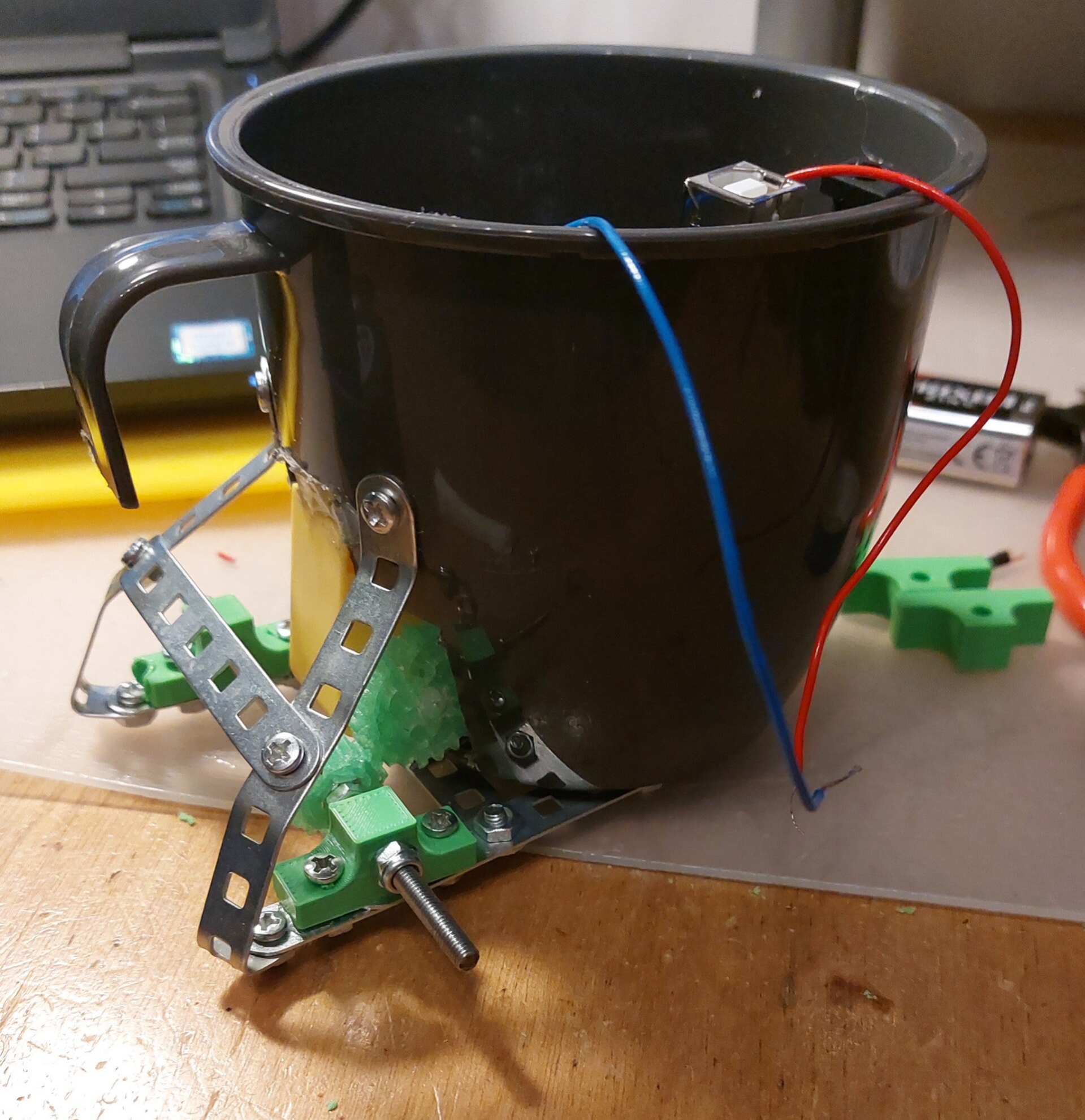
De tandheugel en de draaipiunten ontwerpen.
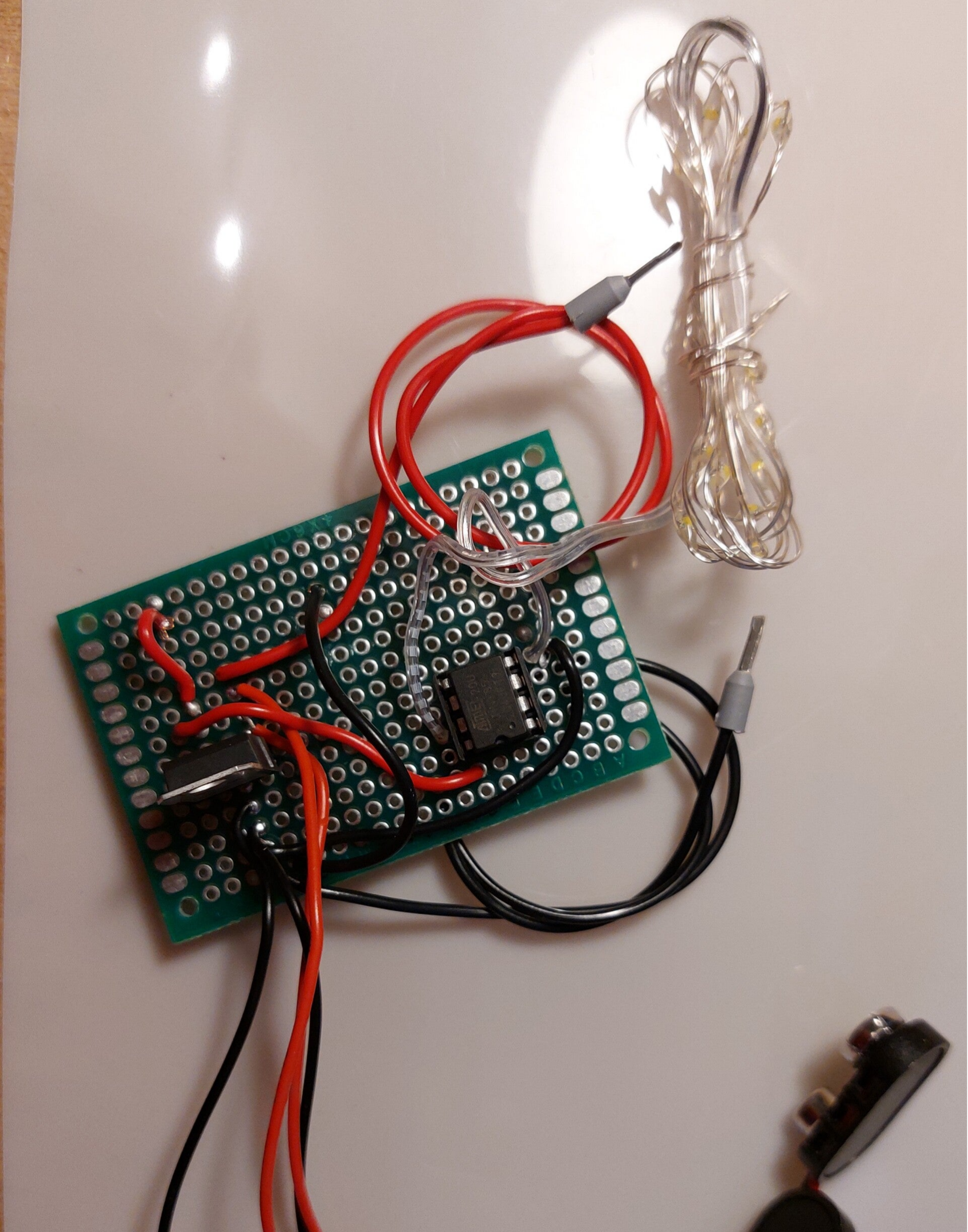
voedings printje
De servo motor geplaatst in het bekertje.
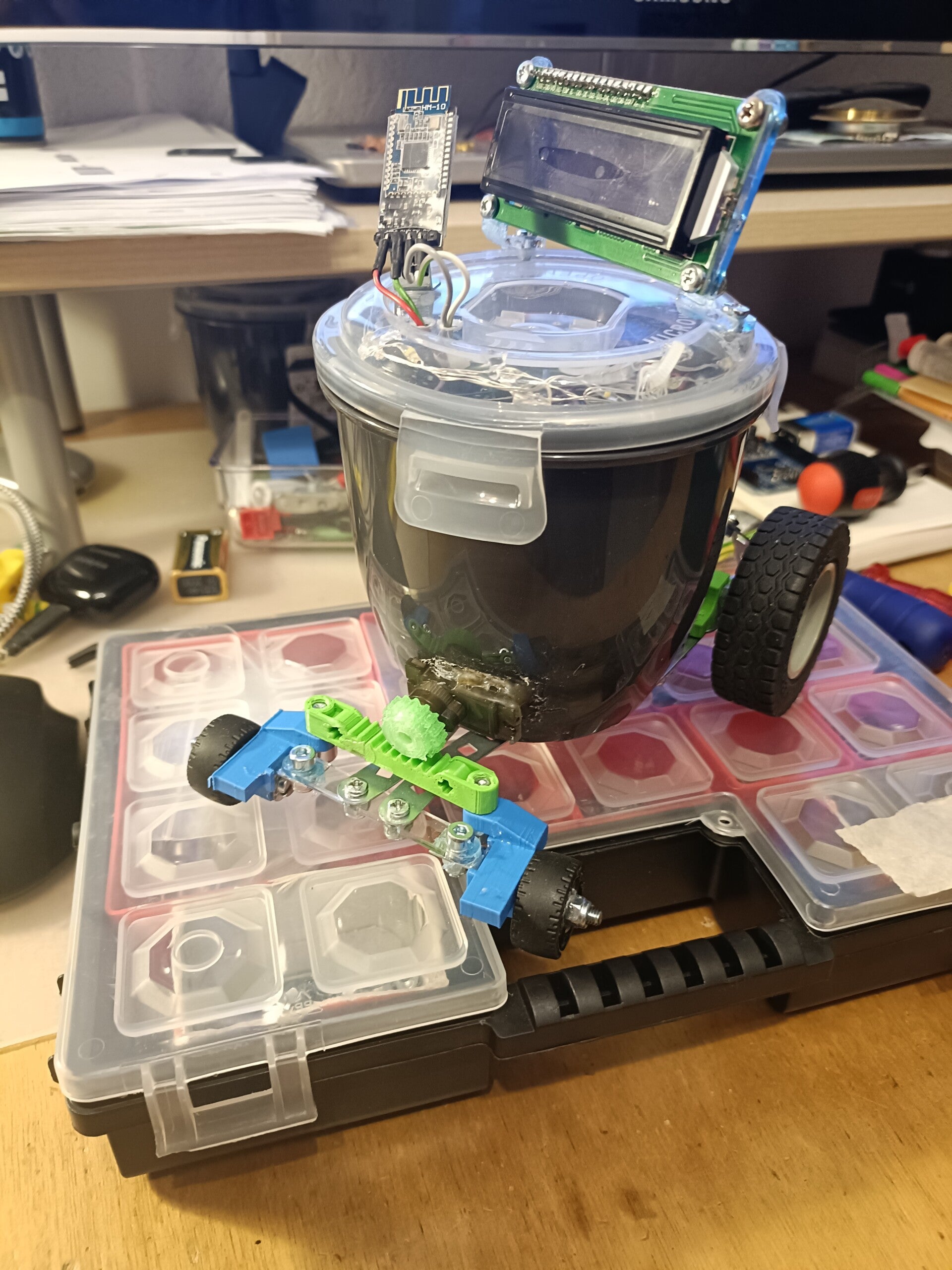
Autootje met servo en tandheugel
De schetsen van de elctronica componenten om te kunnen beginnen met ontwerpen en bouwen.
De arduino uno
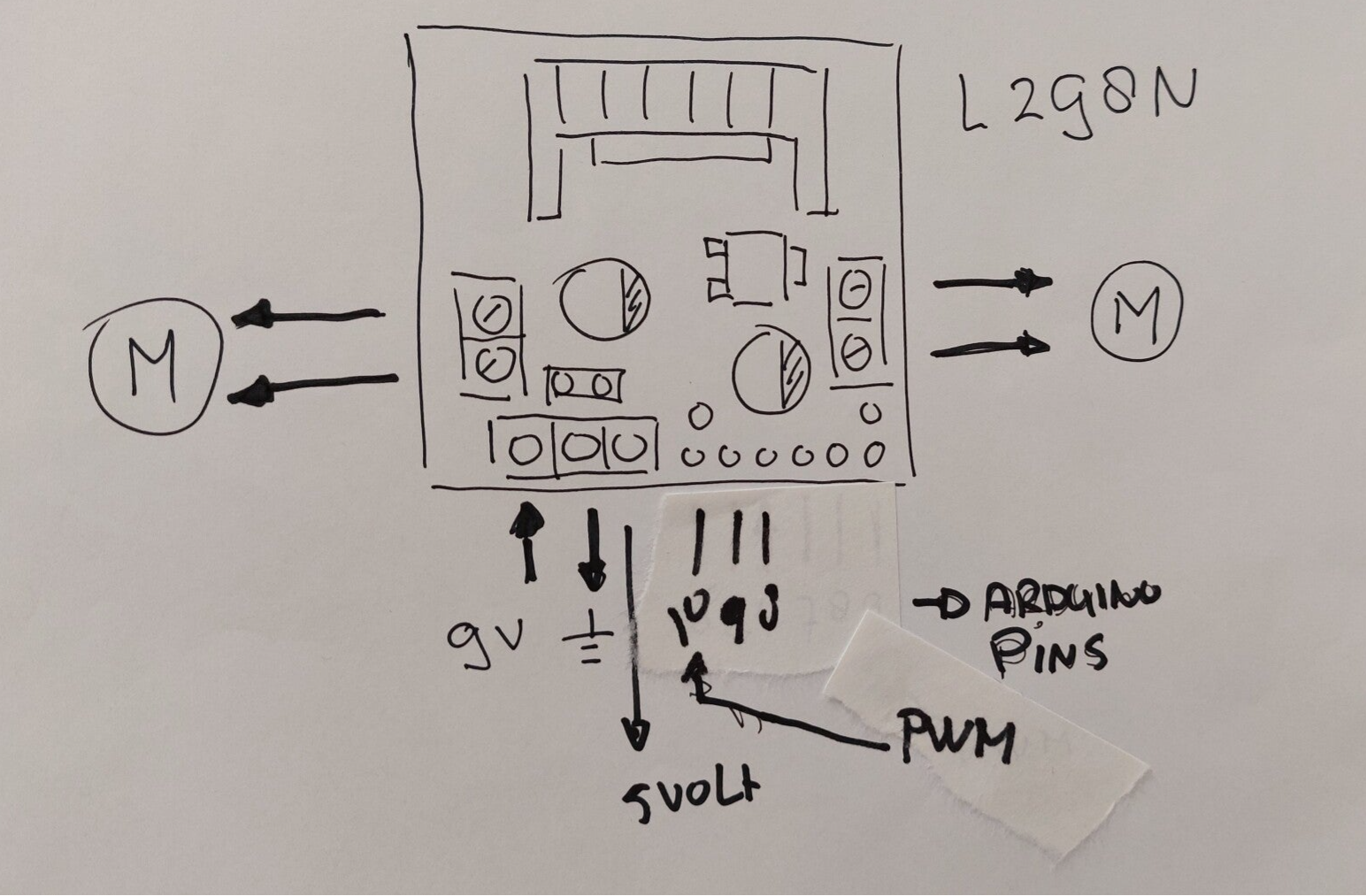
De L298N.

De servo motor.
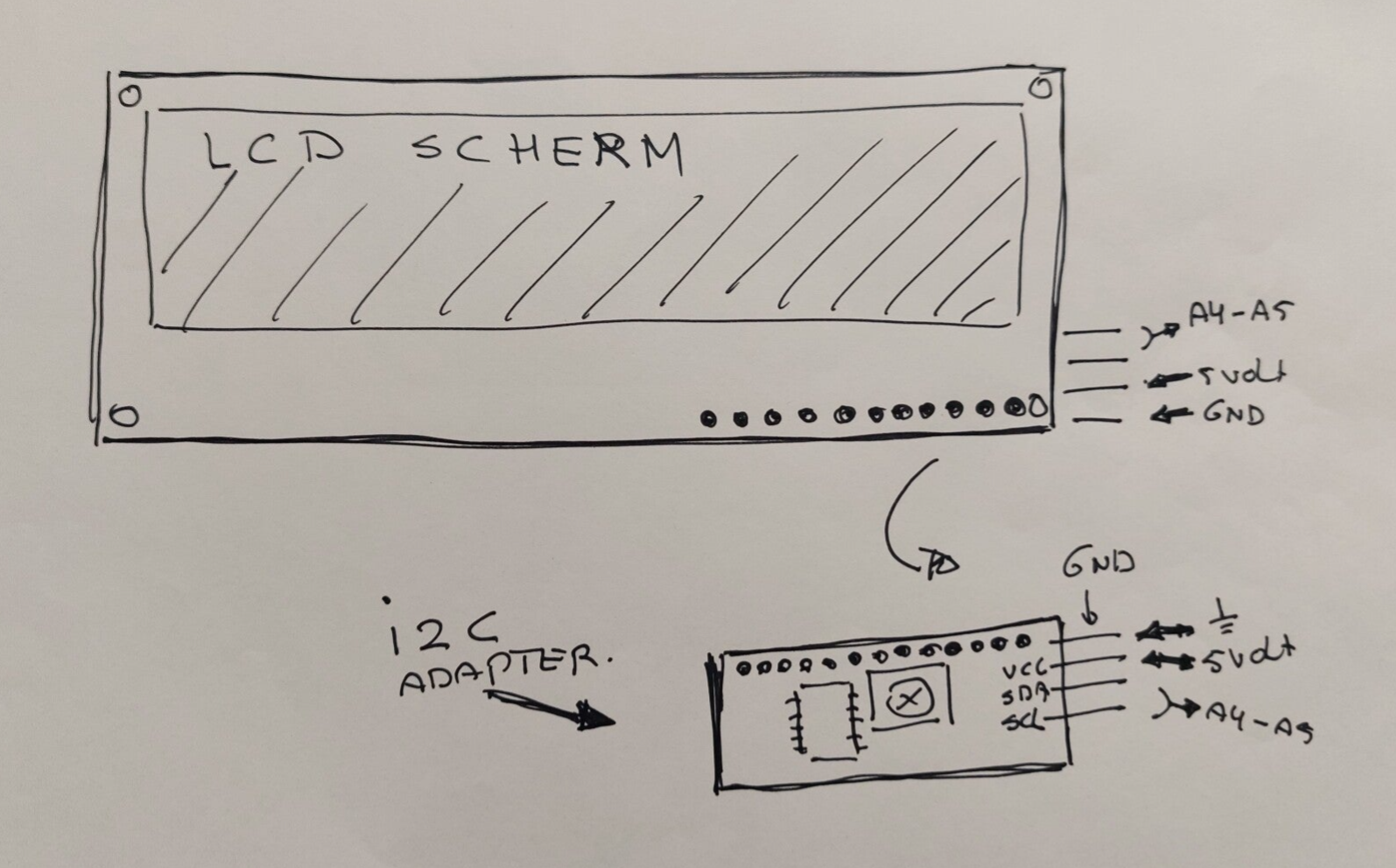
Het lcd scherm met de i2c adapter.
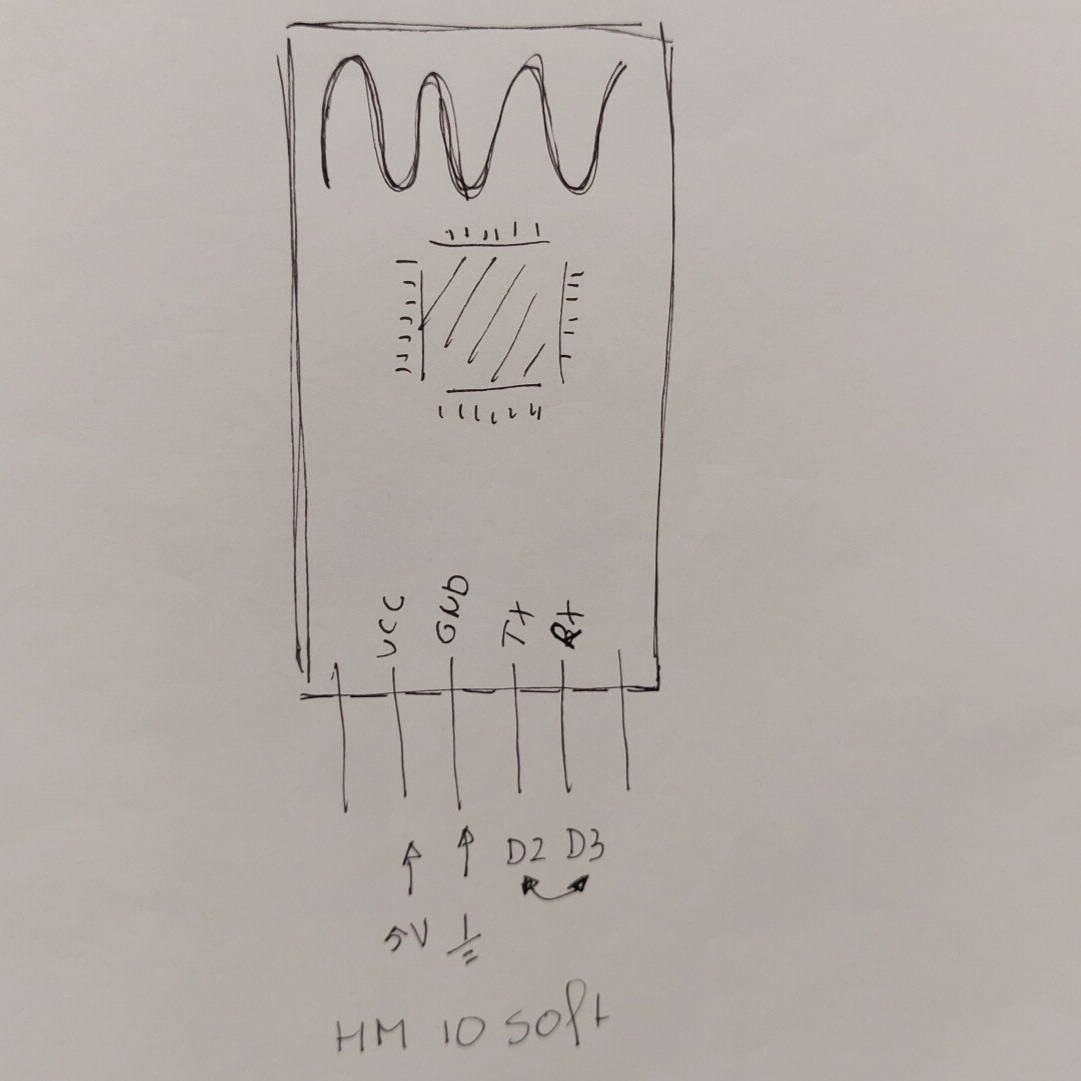
De bluetooth
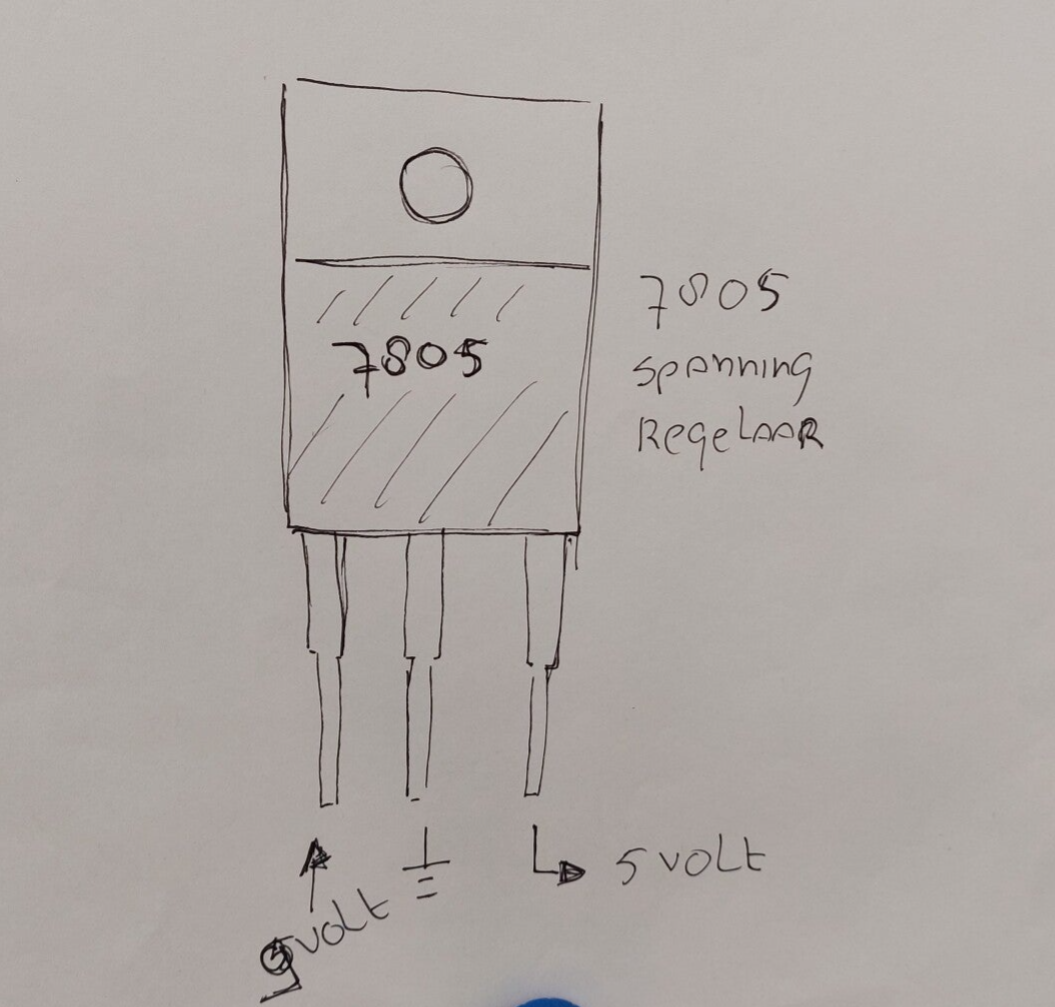
De 7805 spannings regelaar
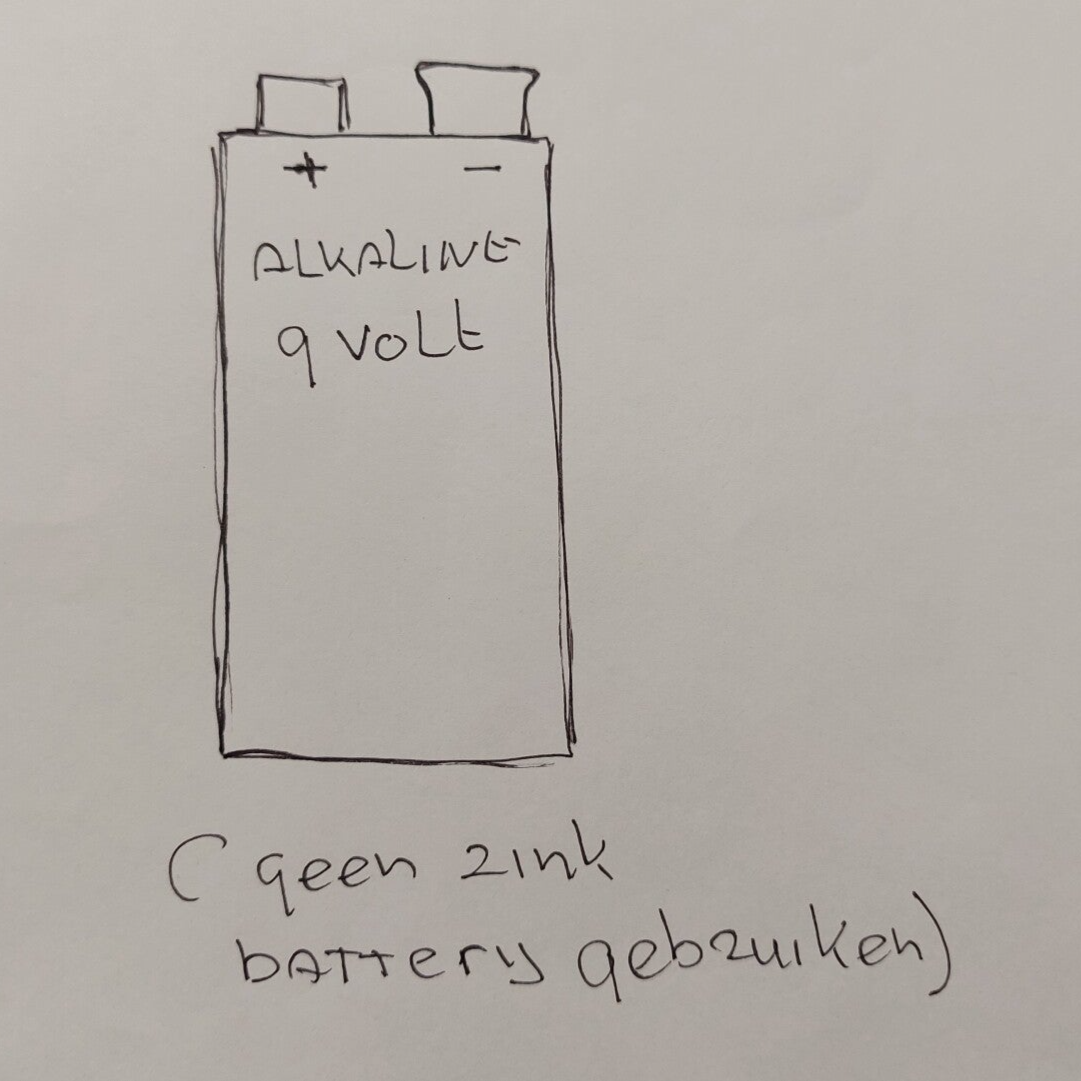
DE battery, alkaline gebruiken.
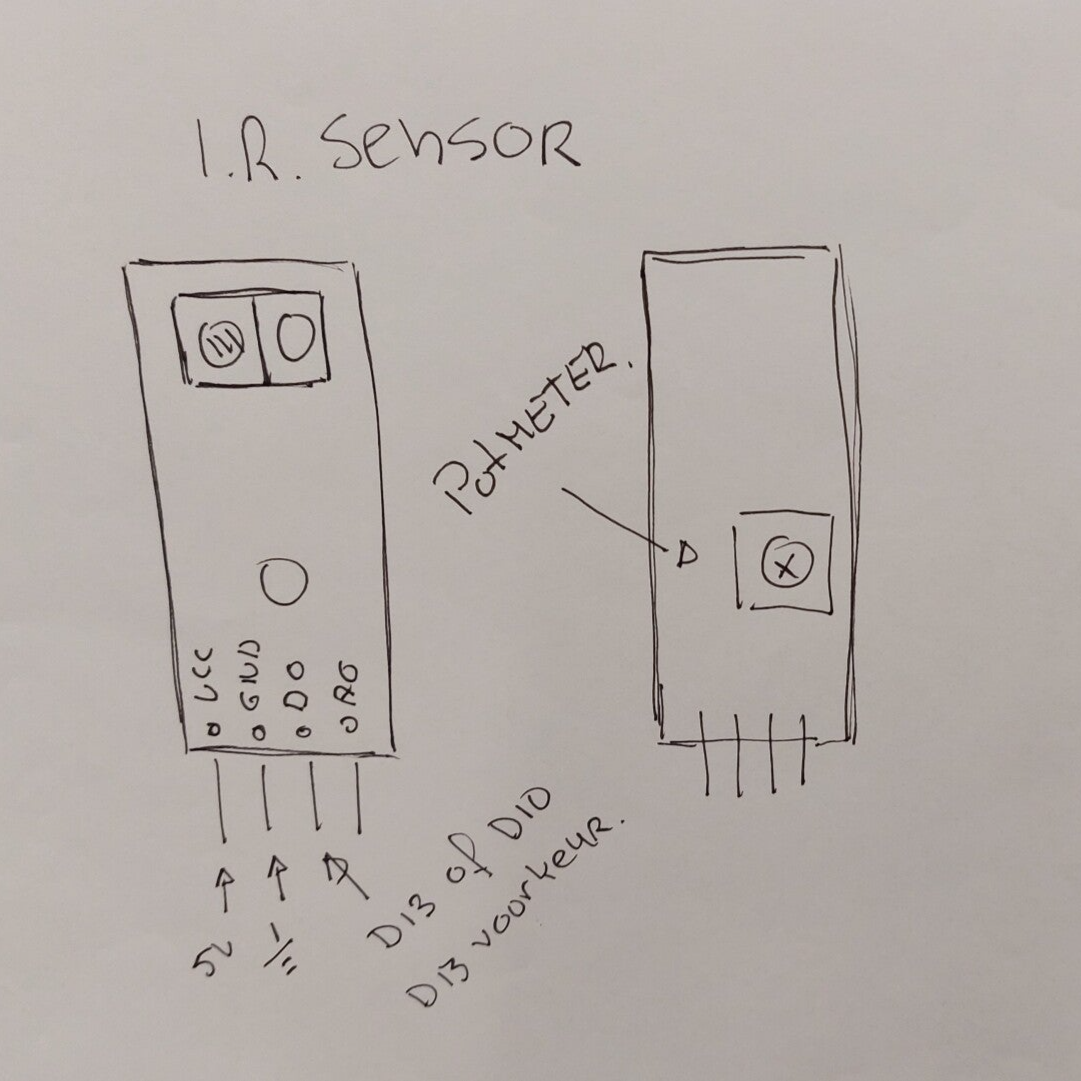
de ir sensor ( optioneel)
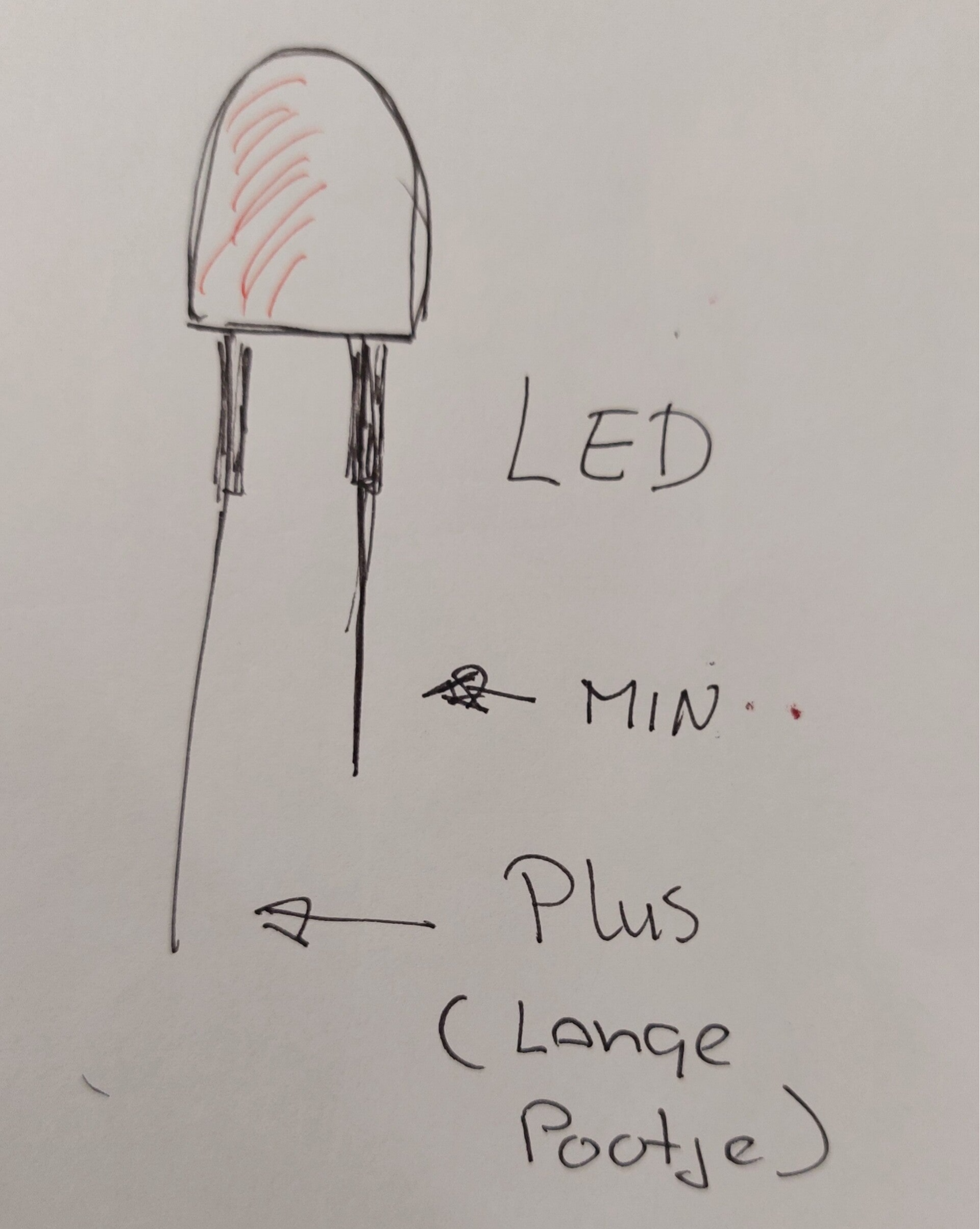
De led voor de sier verlichting.
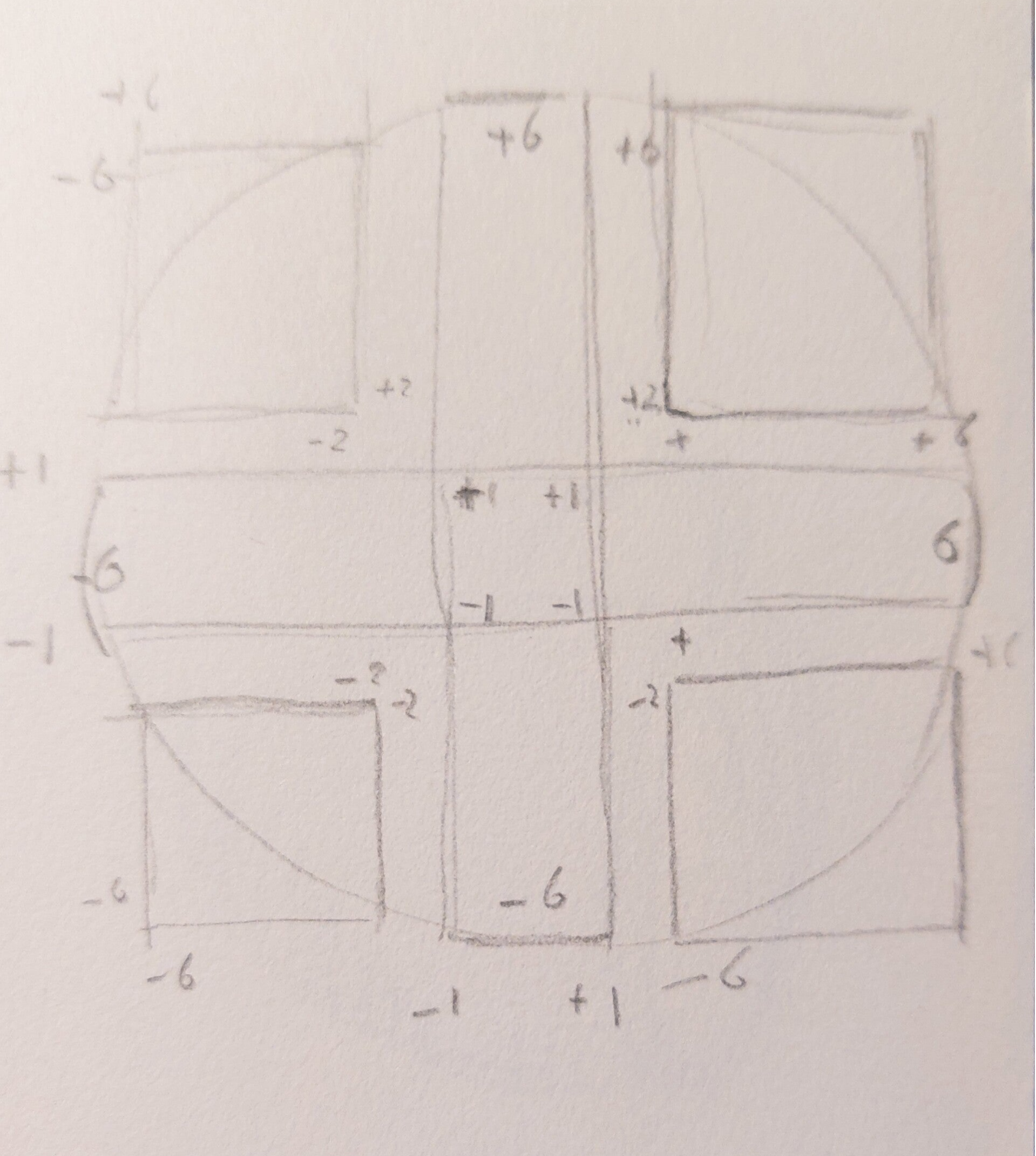
x/y assenstelsel voor de jpystick coördinaten
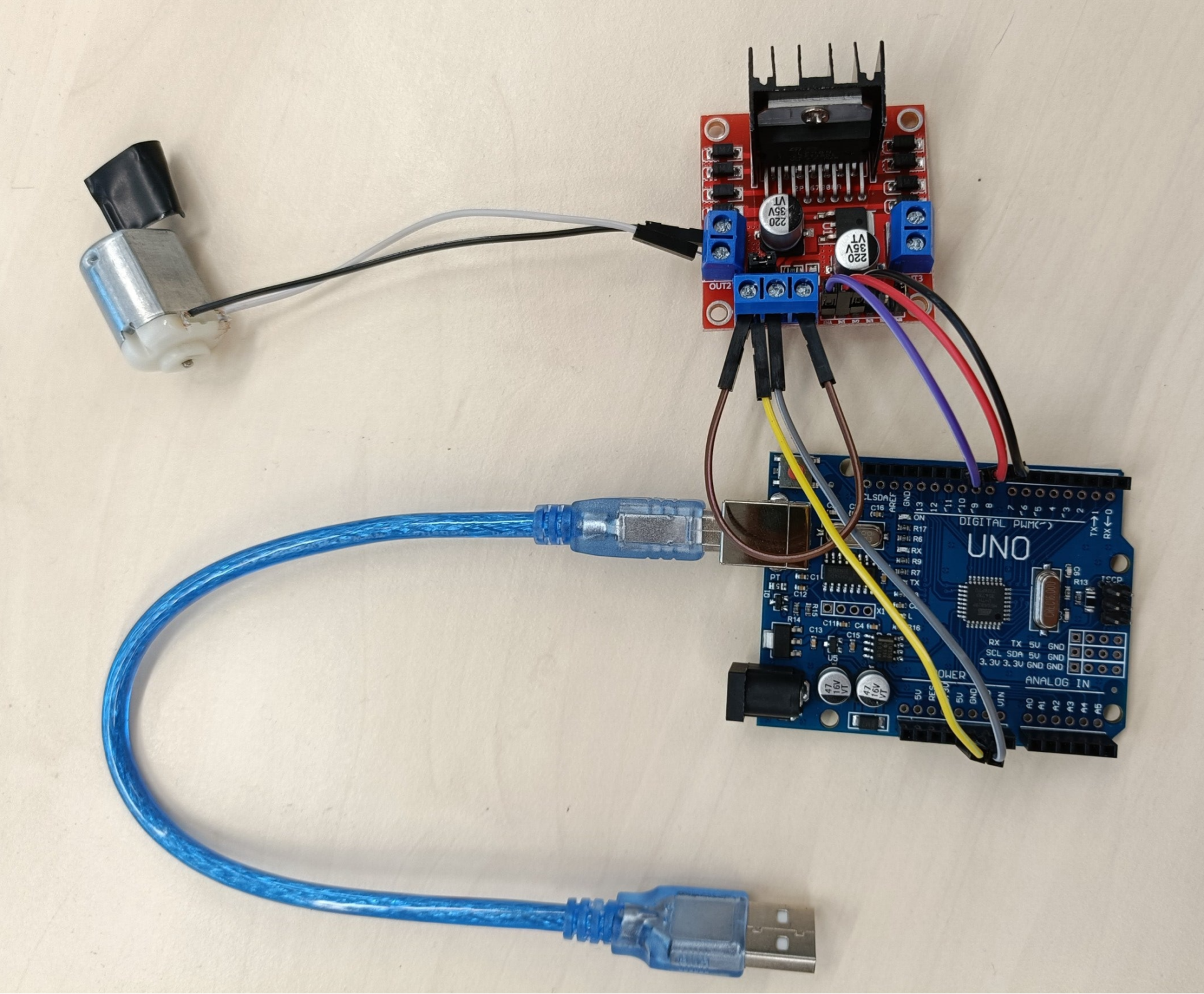
Les 1 en 2 motor en servo test m.b.v. pictoblox
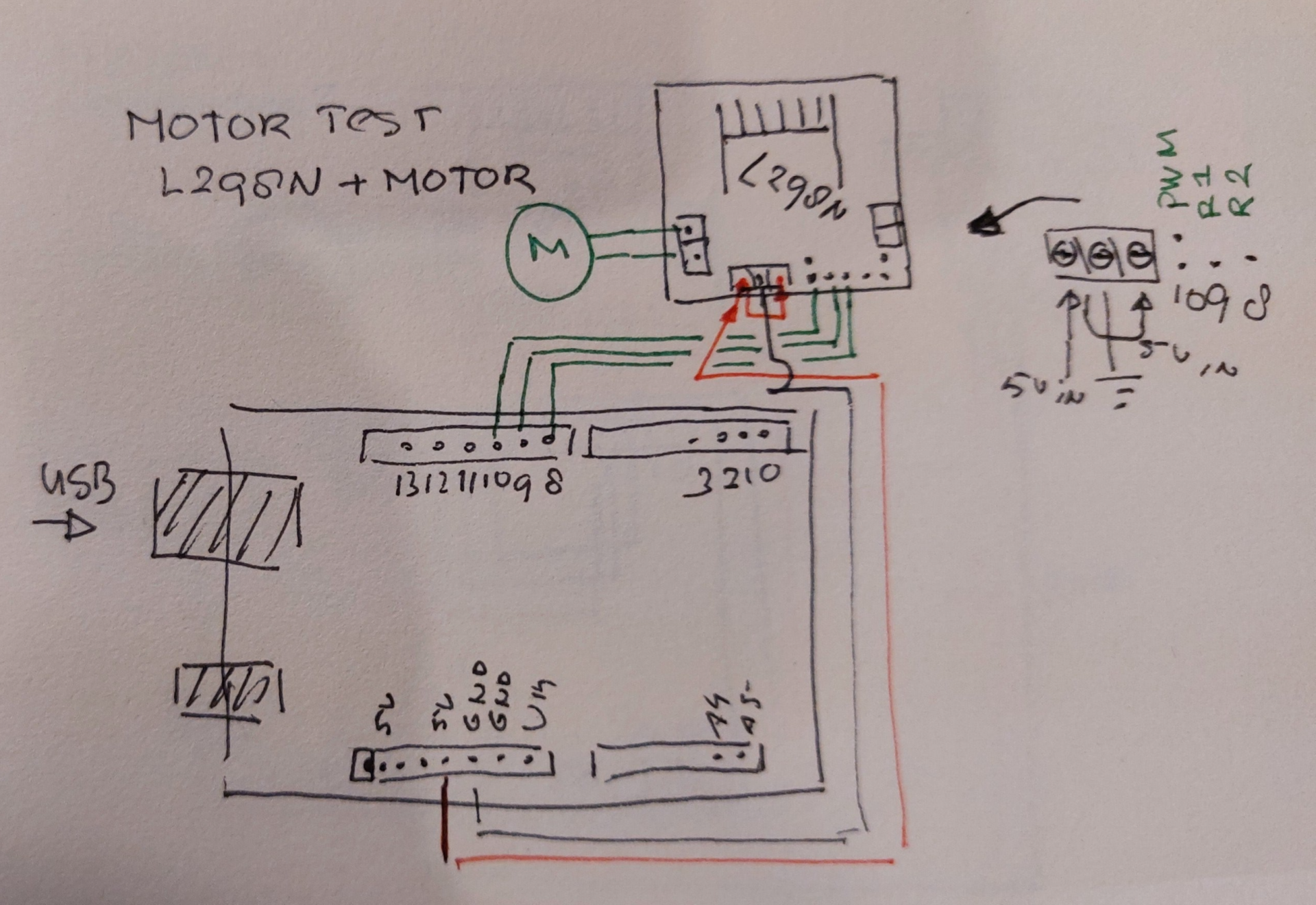
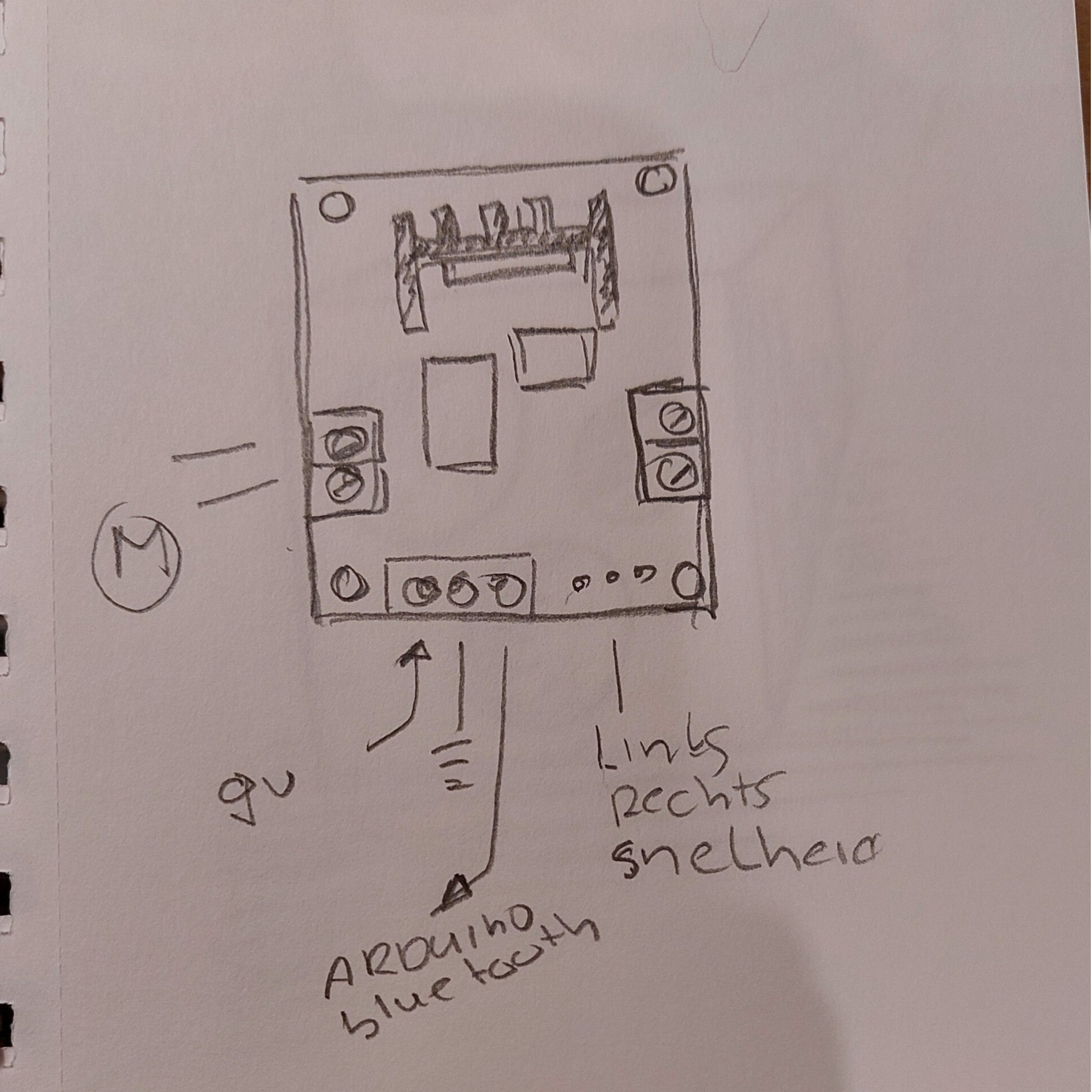
motor test : Motor, Arduino uno en een L298N
LET OP: de 5volt uit alleen doorverbinden als er geen 6volt of meer op de motor spanning in staat. ( bruine draad)
We gebruiken dit alleen voor testen vanaf de arduino.
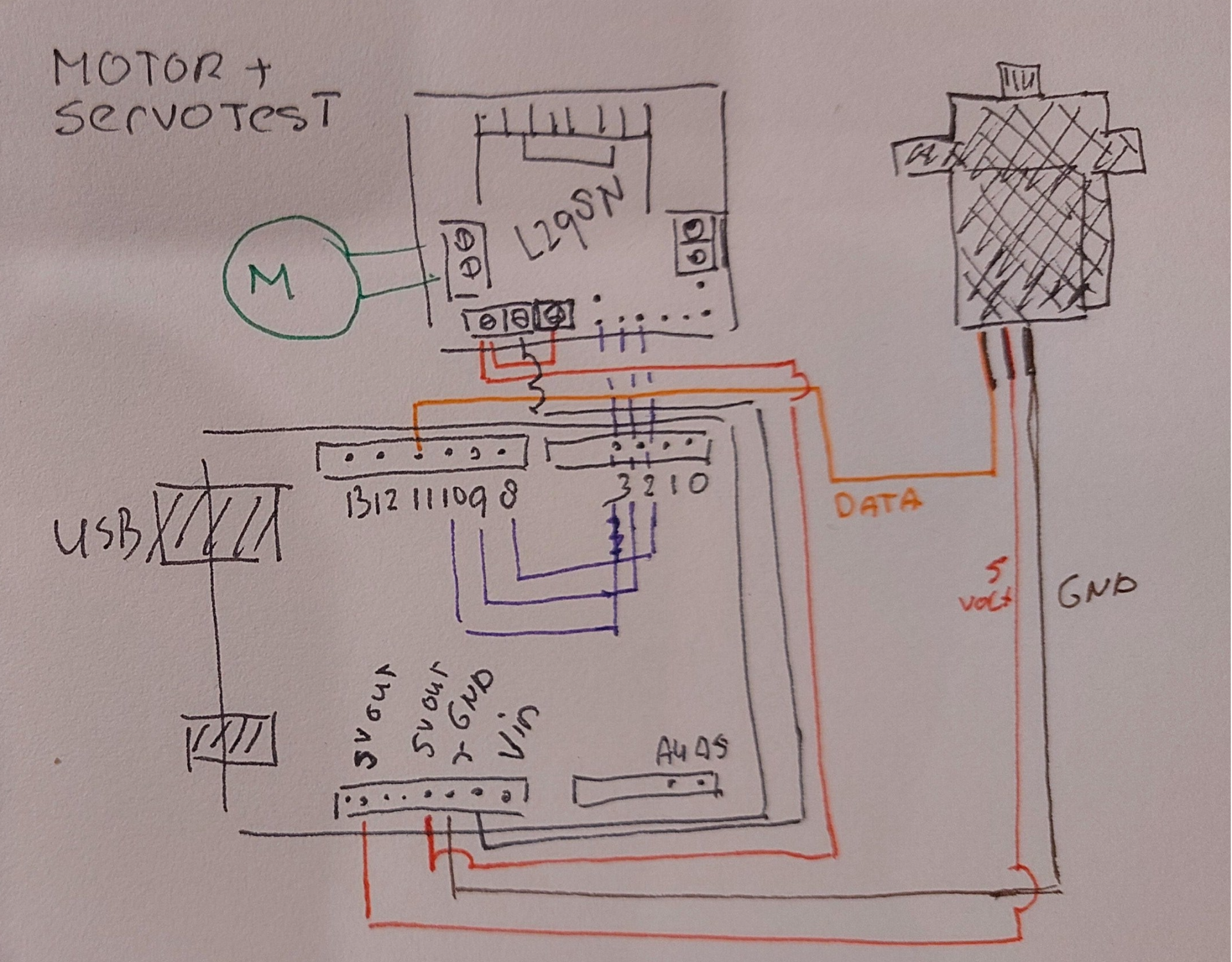
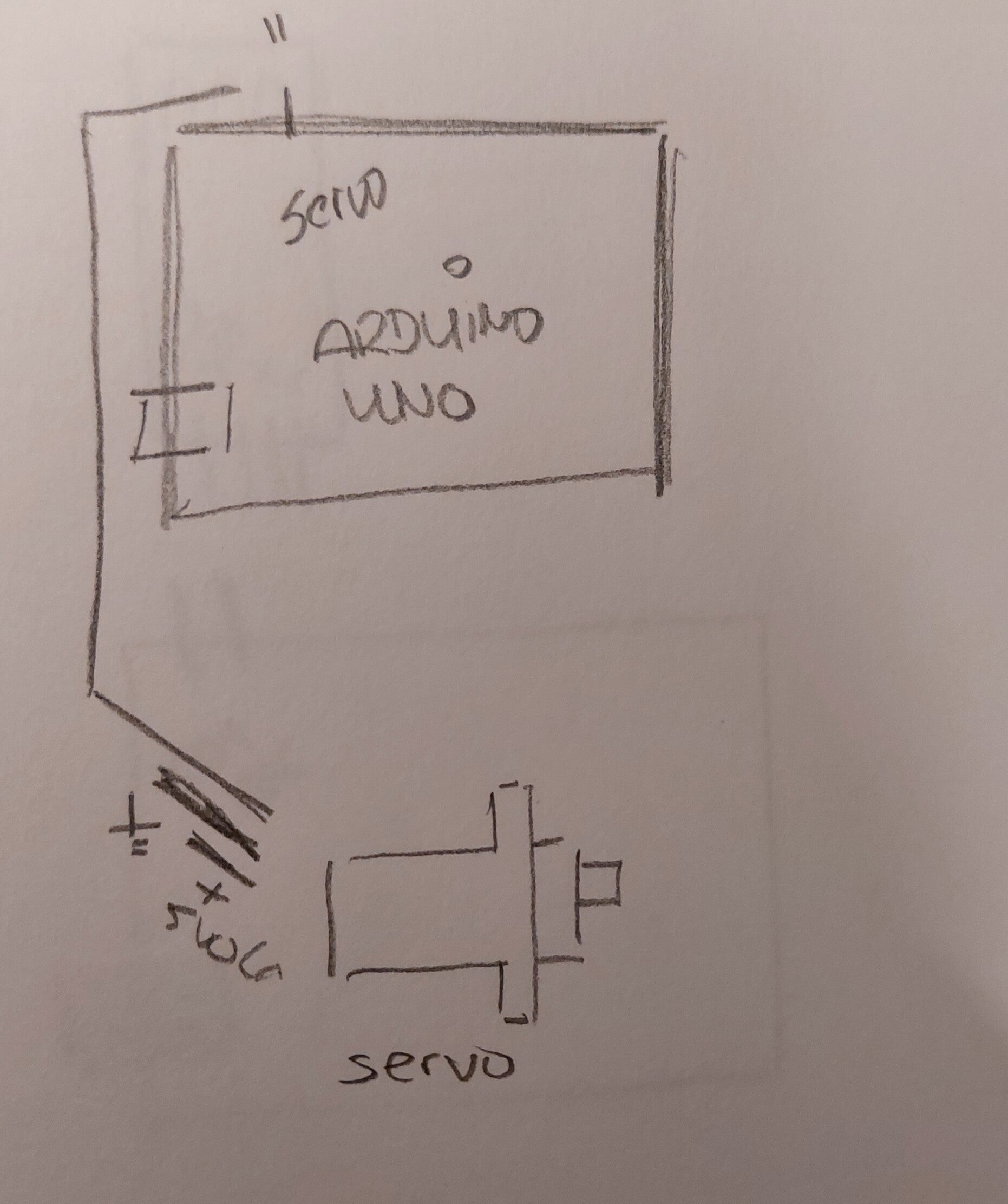
De motor test met een servo toegevoegd op pin 11.
LES 3 en 4 LCD display en bluetooth testen.
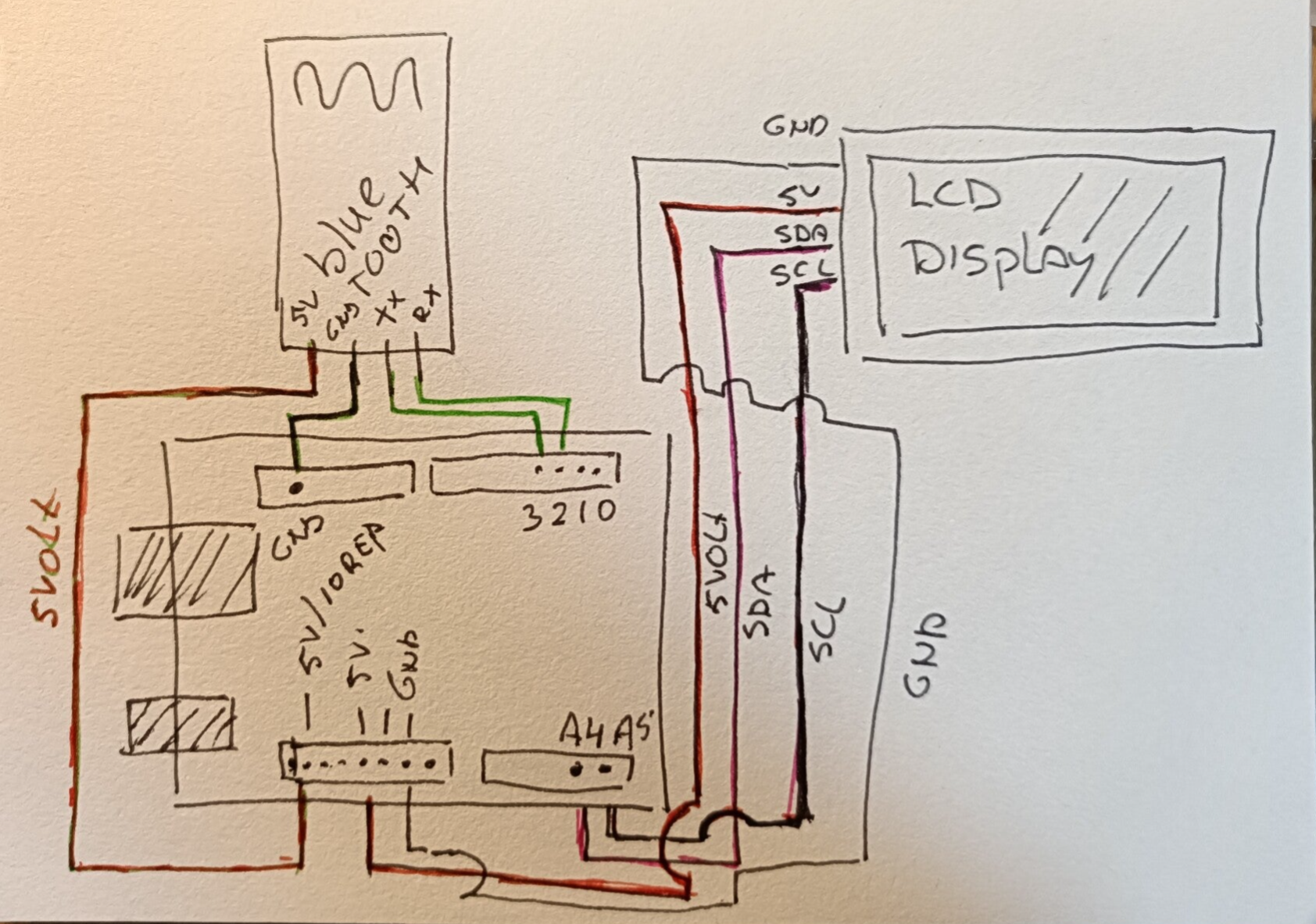
LCD scherm en bluetooh test.

Het coördinatenbord voor de joystik.
X= > -1, x= < 1 en y= > 2
De coördinaten om vooruit te rijden in pictoblox.
De losse voedings print klaar om in te bouwen.

Hier een alternatief voor tandwielen.
Dit is een motor met een aandrijfsnaar poulie.
Ik gebruik hier 2 elastiekjes voor de aandrijving.
Zet de elastiekjes niet te strak, dit is nergens voor nodig.
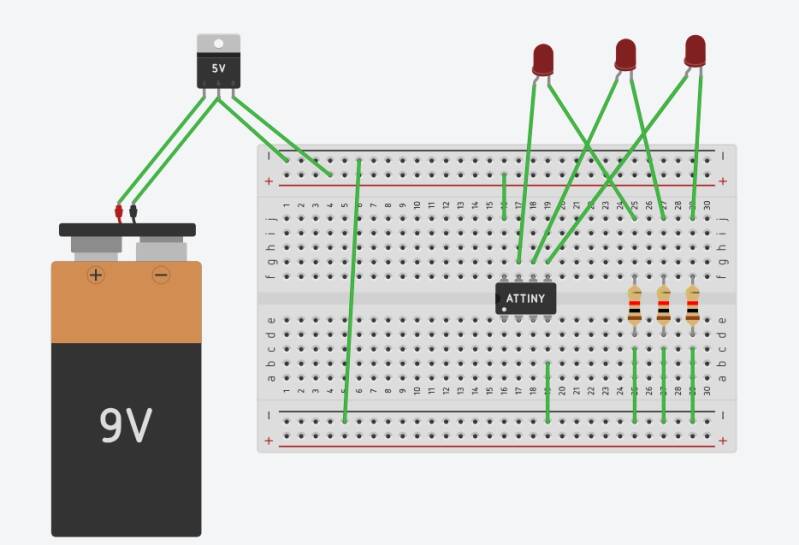
Voorbeeld schakeling voor de ledjes die de richting moeten aangeven.
Je kan ook een bestaand autootje ombouwen.
Ik heb hier van de kringloop een total los playmobil autootje, hij was al in tweeén.

De voorwielen van een tandheugel en draairichting voor zien, deze wielen konden niet sturen.

De servomotor op de bodemvast gelijmd.

De auto van 2 achterwielen en achterwiel aandrijving voorzien met 2 kleine motortjes.
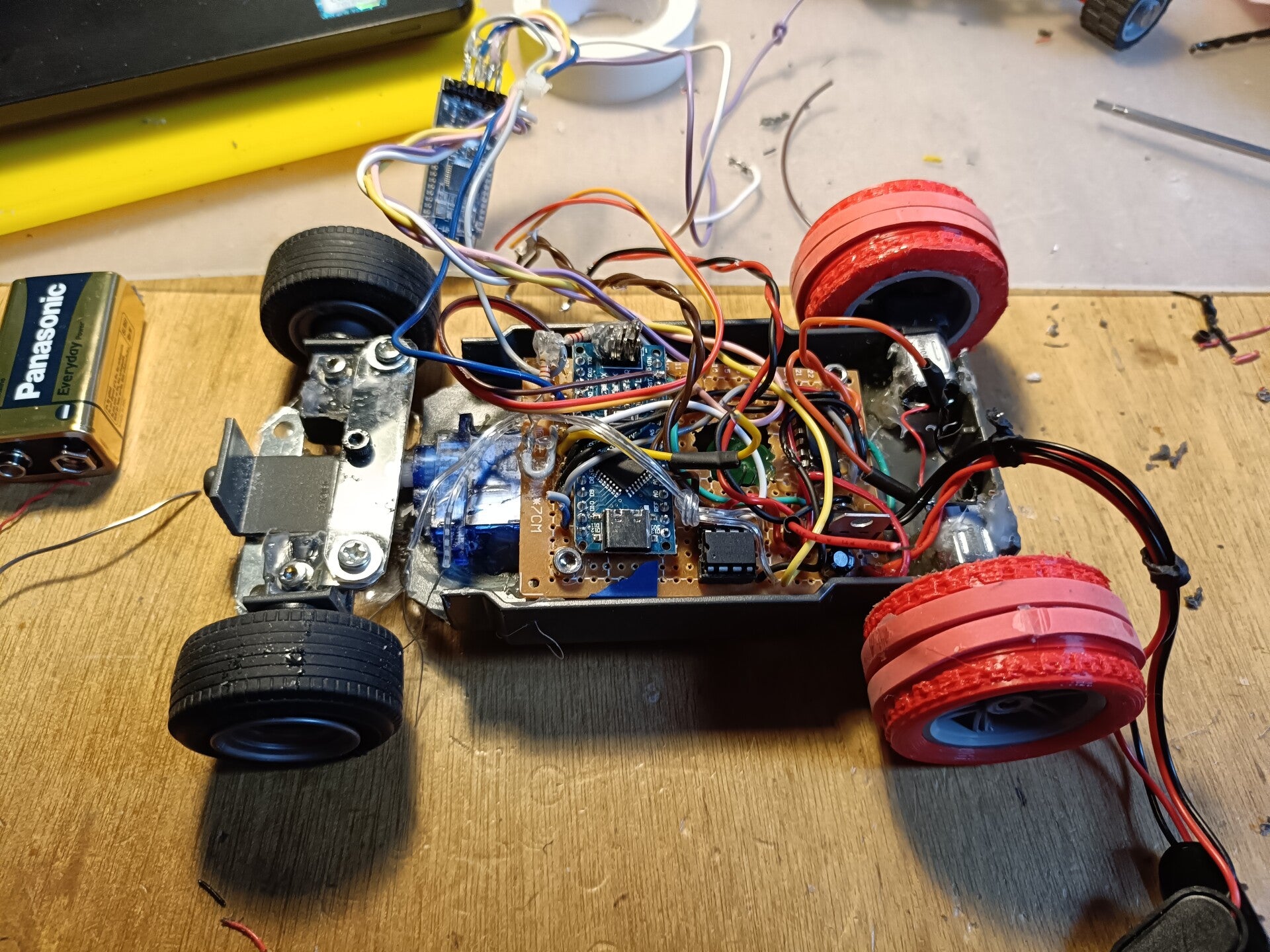
De besturing overzetten van uit het dooosje naar het autootje.

Het geheel proefpassen met de electronica in de carosserie.

Als het geheel gecontroleerd is en alles past ga je hem tesen en laten proefrijden zonder behuizing.

De eerste testen na overzetten van het lcd display.
Alle bedrading ingekort omdat alles nu dichter bij elkaar zit.
De video samenvatting van het race auto project.
Maak jouw eigen website met JouwWeb