Hier komt het nieuwe periode 2 project van 2024.
Het wordt een voetbal autootje.
Met dit project gaan we ons wat meer verdiepen in het ontwerpen en daarna maken.
We kijken naar de verschillende werkprocessen die je tegen komt in een project.
De werk processen die je tegen kan komen in het ontwerp proces tijden een project.
B1-K1-W1 Verzamelt en verwerkt ontwerpgegevens
B1-K1-W2 Werkt ontwerpen uit
B1-K1-W3 Kiest materialen en onderdelen
B1-K1-W4 Maakt een kosten berekening
B1-K2-W4 Levert het werk op
P1-K1-W1 Verzamelt en verwerkt productiegegevens
Het toepassen van deze werk processen is een voorbereiding op jullie examens in leerjaar 4
Een kort voorbeeld van hoe de docent is begonnen met het ontwerpen van dit project.

Opzetten van wat heb ik nodig voor een voetbal autootje.

We beginnen altijd met schetsen voordat we hem in 3D gaan tekenen en samestellen in inventor





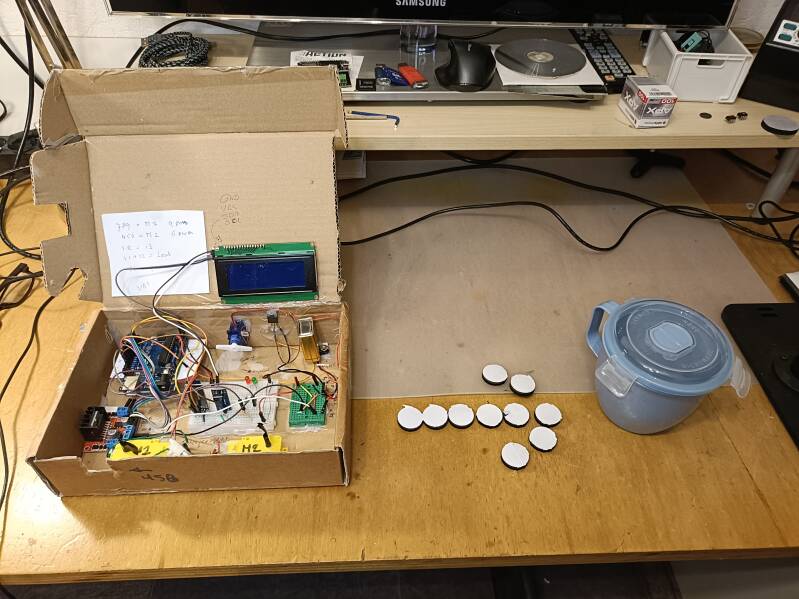
Opbouw van het prototype met de arduino uno. Het prototype met de arduino uno en display. Testen met de telefoon app

De laatste versie van het doosje bevat een mosfet om de kleine dc motor aan te sturen. ( dit is een aangepaste servo motorr)
Voor de aanpassing van de servomotor kijk op de lijnvolger pagina.
https://school-voor-t-en-e-delft.jouwweb.nl/lijnvolger
In de tekening wordt de mosfet aangestuurd met 9 volt, het kan ook via de 7805 met 5 volt.
Het stuur signaal komt nu van D10 i.p.v. D13
De benodigde onderdelen:
-arduino uno
-breadboard
-servo motor 360 graden
-bluetooth HM10 soft
-ir sensor
-dc motoren met vertraging
-mosfet irf44n
-7805 spannings regelaar
-ledje of led balkje
-aansluit draadjes
-doosje voor prototyping ( zelf regelen
-aansluiting batterij 9v ( zelf regelen)
-behuizing robot auto ( zelf ontwerpen en 3D printen)
- wielen voor de robot auto ( zelf regelen)
Week 1, Fase 1
( les 1 en 2)
Uitleg van de opdracht en laten zien wat er gemaakt moet worden.
Voorbeeld auto buitenkant bespreken en hoe deze getekend kan worden op papier en in autodesk inventor of ander een programma.
De eerste stappen van het elektrisch schema op papier.
We maken een schets van het autootje op papier en een prototype in een doosje alvorens alles in te bouwen in het autootje.




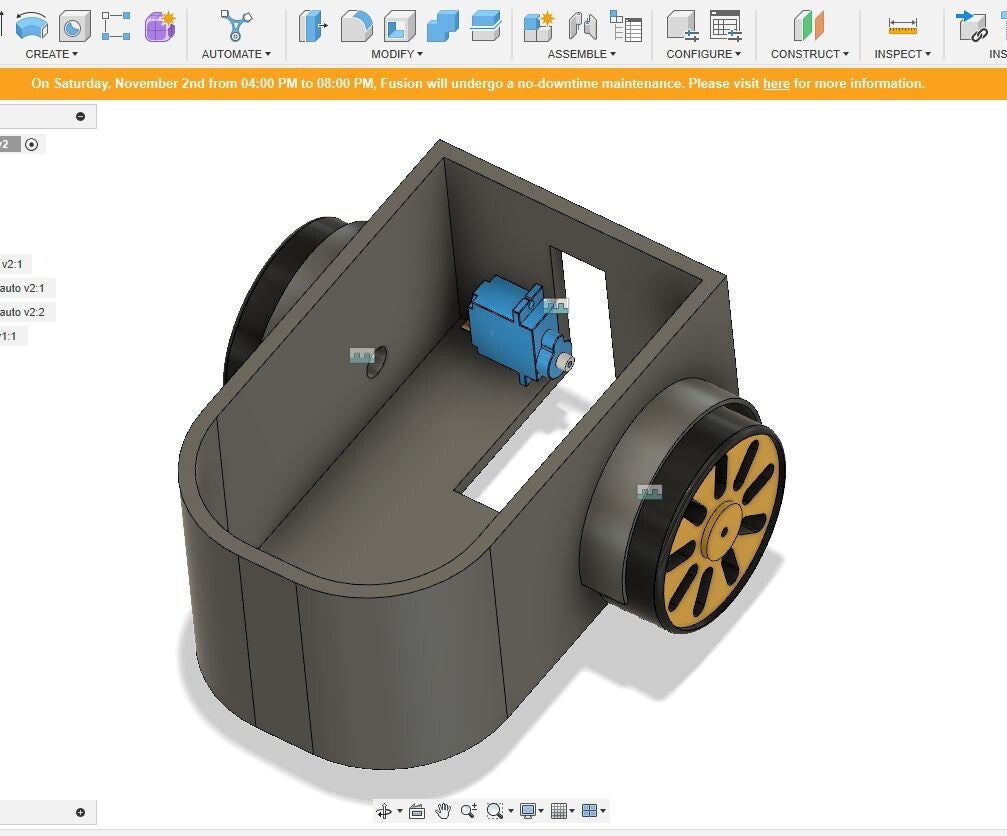

Meer tips om het autootje in autodesk inventor of autodesk fusion te ontwerpen volgen de de les.
We beginnen altijd met een hand schets, niet zomaar gelijk in inventorof een ander teken programma beginnen.
We gaan nu eerst even kijken hoe we de IR sensor ,de bluetooth en het lcd scherm moeten aansluiten op de arduino uno.







De arduino uno. Arduino pin out schematisch De IR sensor . De hm10soft bluetooth module.





Het lcd scherm met de I2C module. Breadboard. Led.

Aan de linker kant het geschetste aansluit schema om de ir sensor en de ledjes te testen.
We gebruiken D10?D13 voor het ir signaal en D11 en D12 voor de ledjes.
Bij alle hierna volgende testen en schama's blijven we deze pinnen hiervoor gebruiken.
Aan de rechterkant een voorbeeld block code gemaakt in pictoblox


In het schema aan de linker kant hebben we nu bluetooth toegeveoegd.
We gebruiken hier pin D2 en D3 voor en in het vervolg blijven we D2 en D3 gebruiken voor de bluetooth.
Mocht het bij testen niet werken dan even rx en tx op de bluetooth adapter omwisselen.
Aan de rechterkant een voor beeld block code voor de bluetooth.


We gaan ook nog even kijken naar het lcd scherm en hoe die aan tesluiten met de i2c adapter op de arduino uno.
we gebruiken A4 en A5 als comunicatie poorten voor het lcd scherm
Op de i2c adapter noemen ze de communicatie poorten sda en scl
We gebruiken de Dabble app op de telefoon
Aan de rechterkant 2 voorbeeld blockcode om het lcd te testen en een om het lcd en de bluetooth module te testen.
Let erop het kan zijn dat je tr/rx en of sda/scl moet omdraaien.


Week 2
(3 en 4)
We gaan het programma Pictoblox op de laptop zettten mocht je dit nog niet gedaan hebben en het programma Dabble op je telefoon.
Hierna gaan we beginnen met inbouwen in het doosje en gaan staps gewijs testen, we hebben al een keer geoefend met de componenten en het programma pictoblox.
Hier onder de eerste aansluit schema's voor in het doosje met de usb als voeding. De schema's zijn het zelfde als de eerste week alleen bouwen we het nu in het doosje.

lcd scherm aansluiten op A4 en A5.
(zie ook pinout schema hierboven)

DE IR sensor op D10 /D13 en de led op D12 of D11, gebruiken. R is tussen de 100 en 470 ohm. D13 is beter voor de led omdat de mosfet op D10 dan regelbaar is.
We gaan eerst het schema tekenen zoals ongeveer in het doosje. We gebruiken de de arduino uno, het breadboard en het lcd scherm als eerste en maken het bovenste gedeelte vam het blok schema om te testen. (Bij geen tekst in het scherm eerst A4 en A5 omwisselen.)
Hierna plaatsen we de ir sensor en een ledje met weerstand erbij en gebruiken het gehele blok schema.



Als het bovenstaande gelukt is gaan we de bluetooth erbij plaatsen.
Gebruik het schema van hiernaast, de teksten op het scherm mag jezelf verzinnen.
TX en RX sluit je aan op D2 en D3.
We hebben de bluetooth al een andere naam gegeven.
We gebruiken Dabble voor de bediening.
Reageert de bluetooth niet dan RX en TX omdraaien.
Week 3
les 5 en 6 We gaan de mosfet., de 7805 en de omgebouwde servo inbouwen.







De servo motor die we gaan ombouwen naar dc motor. De IRFZ44N mosfet om de servo aan te sturen. De lm7805 spannings regelaar.
Hieronder de aansluit schema's voor het doosje met een 9volt batterij als voeding. We gebruiken de 7805 om de 5 volt te verkrijgen voor de arduino uno.
De schema's komen grotendeels overeen met de eerste 2 weken, alleengebruiken we nu 13 voor de IR sensor en 10 voor de mosfet/kleine dcmotor.


Aansluitschema zonder l298N. Simpele code om de servo en de mosfet te testen.
Impressie van de eerste stappen met aansluiten in het doosje.




week 4
Les 7 en 8
We gaan nu de motor driver l289N gebruiken en 2 DC motoren.





L298N motordriver board. DC motor met vertraging. Adereind hulsen. Adereind huls tang.



Aansluitenvan de L298n op de arduino en de motoren. Motor aansluitingen testen. De motorern testen met de bluetooth.

Hierboven een overzicht van alle onderdelen in het doosje compleet.
Het rode printje is de L298N. ( motoren nog niet aangesloten)
D10 gebruiken voor de motor en D13 voor de IR heeft de voorkeur.
De servo motor is dan regelbaar omdat D10 een pwm is.

Hiernaast een voorbeeld van overzichtelijk werken in het doosje. De kabels en onderdelen zijn van labels voorzien.
Dit labelen is ook belangrijk voor de leerjaar 2 , 3 en 4 projecten.
Alle onderdelen zijn nu aangesloten.


Hierboven een klein voorbeeld van hoe je eigen blokken aan te maken en deze in de besturings blokken te plaatsen.

Hierboven een voorbeeld van hoe de balschiet functie te plaatsen in het blok programma.
Heb je het bovenstaande allemaal goed gedaan dan ga je beginnen alles
uit tewerken in je verslag en deze laat je controleren door de docent nederlands.
Hierna ga je alles van uit je doosje in bouwen in het 3d geprinte autootje.
Het bekertje hiernaast moet een 3D geprint autootje voorstellen.
( Ik ga wel proberen of alles er in past.)

Alles ingebouwd.

Bedrading voorzien van adereind hulsjes.
Een algehele test om tekijken of hij werkt met beide besturingen.
Voorbeeld voor het overzetten van de electronica naar het autootje in een wilekeurig bakje/bekertje

Van test opstelling naar autootje.

De motoren plaatsen.

De mosfet plaatsen voor de servo

De servo zo monteren dat hij goed kan schieten.

De batterijhouder en de 7805 inbouwen.

De arduino plaatsen

De l298N motor driver print geplaatst.

De soldeerprint voor de 9Volt, 5 Volt en de massa ( ground).

De Bluetooth module geplaatst.

Een beginne maken met alles te bedraden/verbinden.

De infrarood sensor plaatsen.

De optionele ATtiny voor het looplichtje.

Het lcd scherm goed zichtbaar plaatsen.

Het achter/draaiwiel plaatsen

Nieuwe plek voor de IR sensor. OP oude plek zag hij het balletje niet goed.

Onderzijde van het autootje.

De led controle.

De AT tiny en de lcd sensor geplaatst.

Proefpassen met de batterij en alles gemonteerd.

Kijken of alles werkt met de telefoon app van Dabble.

De app werkt ook.

Het resultaat. met aan en uit
knop.
De resultaten van enkele leerlingen op het traject board aan het eind van periode 2, fase 1 van het autootje.
Fase 2 begin periode 3.
(meer zelfstandig werken)

In fase 2 begin periode 3 gaan we de besturing omzetten naar de joystick modus.
Dit doen we ook in pictoblox.
Als eerste gebruiken we 5 of 9 coördinaten om de joystick te besturen.
Pas als dit gelukt is en gefilmd met foto van de code mag je erder met bijvoorbeeld hoeken gebruiken om de joystick te programeren.
Fase 3
( meer zelfstandig werken)

De lijnvolger sensoren neer geklapt,

De lijnvolger sensoren opgeklapt.
Filmpje van de auto als lijnvolger en voetbal auto.
IN fase 3 gaan we het autootje uitbreiden met een lijzoeker functie.
Dit programma mag moet behulp van een keuze schakelaar aan gezet worden als je hem als lijn volger of voetbal auto wil gebruiken.
De sensoren moet wel zo geplaatst zijn dat ze bij het voetballen niet in de weg zitten.
De benodigde code is bijna gelijk aan het autootje van periode 1
In het filmpje hierboven zie je de bedoeling van de lijnvolger en dat hij schakelbaar moet zijn.
De keuze moet tezien zijn op het display.
Let erop dat je een pulldown/up gebruikt voor de schakelaar.
De schakelaar zet je op D11 of D12, afhankelijk van welke vrij is.
De sensoren zet je op de vrije analoge poorten en geeft die aan als digitaal in het programma.
Maak jouw eigen website met JouwWeb